Tóm tắt Luận văn Ngành CNKT Cơ điện tử
1. THIẾT KẾ CHẾ TẠO MÁY PHAY CNC 3 TRỤC
Luận văn “Thiết kế chế tạo máy phay CNC 3 trục” trình bày chi tiết quá trình tính toán thiết kế máy phay CNC 3 trục phục vụ cho học tập, nghiên cứu và đào tạo. Máy được thiết kế chế tạo với vùng hoạt động 350mmx600mmx125mm. Với sai số 0,1mm. Thông qua khảo sát đánh giá tình hình nghiên cứu trong và ngoài nước để đưa ra mục tiêu cụ thể của đề tài. Từ đó sử dụng phần mềm Inventor để tính toán thiết kế mô hình máy phay CNC 3 trục. Đề tài cũng trình bày chi tiết thiết kế, lắp đặt hệ thống điện điều khiển máy. Thực nghiệm máy với các vật liệu khác nhau như:khắc, cắt, phay hình tròn và hình vuông trên các vật liệu gỗ, mica và nhôm. Kết quả máy được chế tạo hoàn thành đáp ứng được mục tiêu đã đặt ra là sai số 0.1mm, máy vận hành tốt, chi phí chế tạo thấp, máy dễ dàng thao tác và điều khiển, gia công được nhiều loại vật liệu khác nhau như: gỗ, nhựa, mica, nhôm,…


2. XÂY DỰNG MÔ HÌNH ĐÓNG GÓI SẢN PHẨM DỰA TRÊN CÁNH TAY ROBOT VÀ XỬ LÝ ẢNH
Đề tài nhằm mục tiêu xây dựng mô hình đóng gói sản phẩm dựa trên công nghệ xử lý ảnh và cánh tay robot, sản phẩm cụ thể là đóng gói hộp keo tản nhiệt. Đề tài trình bài các phương pháp xử lý ảnh (sử dụng camera công nghiệp là thiết bị thu nhận hình ảnh) kết hợp tính toán và thiết kế mô hình đóng gói sản phẩm bằng phần mềm Autodesk Inventor. Trong mô hình sử dụng cánh tay robot SCARA để thực hiện quá trình đóng gói. Kết quả thực nghiệm cho thấy mô hình đóng gói sản phẩm có tốc độ ổn định và độ chính xác khi đóng gói liên tục trong thời gian dài. Tốc độ trung bình 23.88 giây và đạt độ chính xác 94.9% để đóng gói một hộp 6 sản phẩm keo tản nhiệt.


3. CHẾ TẠO MÁY ĐIỂM DANH SINH VIÊN TÍCH HỢP ĐO THÂN NHIỆT VÀ KHỬ KHUẨN TAY TỰ ĐỘNG
Đề tài xây dựng hệ thống điểm danh đo nhiệt độ tích hợp khử khuẩn phải dùng camera để quét mã QR Code và cảm biến hồng ngoại dùng để phát hiện có người vào để thực hiện các chương trình đã được lập ra cho hệ thống. Áp dụng công nghệ xử lý ảnh để nhận mã QR. Hệ thống hoạt động tuần tự từng chức năng, nếu chưa hoàn thành thì sẽ được nhắc nhở bởi loa báo. Hệ thống phần cứng phải được thiết kế tối ưu nhất cho người dùng. Được trang bị LCD 16×2 và loa thông báo để nhắc nhở người dùng đồng thời hiển thị kết quả lên màn hình. Bên cạnh đó, hệ thống sẽ xuất báo cáo và được cập nhật lên Google Drive để dễ dàng theo dõi. Ngoài ra, hệ thống còn có chức năng khử khuẩn tay tự động. Thiết kế nâng cao tính tự động cho hệ thống, hạn chế tác động của con người nhất có thể.

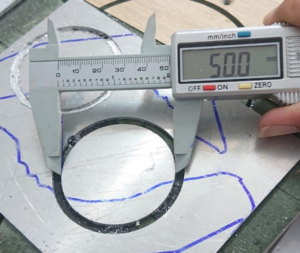
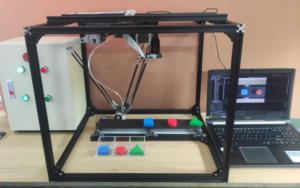
4. XÂY DỰNG VÀ ĐIỀU KHIỂN MÔ HÌNH ROBOT SONG SONG DELTA PHÂN LOẠI SẢN PHẨM DỰA TRÊN XỬ LÝ ẢNH
Đề tài này nhằm mục tiêu thiết kế, chế tạo và điều khiển robot song song Delta phân loại sản phẩm dựa trên màu sắc và hình dáng. Để giải quyết vấn đề trên, đề tài dựa trên bài toán động học của robot Delta và phương pháp xử lý ảnh. Ưu điểm của robot song song Delta là tốc độ phân loại các sản phẩm có trọng lượng nhỏ với độ chính xác rất cao. Đặt điểm cấu trúc của robot Delta được cấu tạo từ các khâu dẫn động song song thông qua các liên kết khớp dạng cầu (khớp bi cầu), cũng nhờ có cấu trúc đặc biệt này làm cho động học của robot này cũng rất khác biệt so với các dạng robot dạng nối tiếp (chuỗi) cơ bản. Khi robot hoạt động, các động cơ truyền chuyển động quay qua các khâu cấu thành robot nên ở đế di động vẫn giữ nguyên được hướng, robot chỉ chuyển động theo 3 trục tọa độ nên robot thường có 3 bậc tự do. Bài toán xử lý ảnh được giải quyết bằng cách đặt sản phẩm trong vùng quét của camera, khi đó dữ liệu hình ảnh được gửi về máy tính để xử lý nhận dạng hình dáng hoặc màu sắc của sản phẩm dựa trên các thuật toán xử lý ảnh, từ đó đưa ra tọa độ tâm sản phẩm và các thông số liên quan đến bộ điều khiển robot, robot được lập trình nhận tọa độ và hút sản phẩm vào khay chứa thích hợp. Qua quá trình chế tạo và thực hiện, kết quả mô hình đạt được 94%, mô hình hoạt động khá tốt, tỷ lệ nhận dạng và gắp đúng sản phẩm khá cao.

5. THIẾT KẾ VÀ CHẾ TẠO ROBOT KHỬ KHUẨN BẰNG TIA UV
Đề tài này nhằm mục tiêu thiết kế và chế tạo robot khử khuẩn bằng tia UV với mục đích khử khuẩn có hại ở những nơi công cộng nói chung cũng như phòng mổ, khu cách ly, siêu thị nói riêng; Đặc biệt là diệt vi-rút corona ở những nơi công cộng, đông người qua lại, hạn chế tối đa tình trạng lây nhiễm chéo trong cộng đồng. Để thực hiện đề tài này tác giả đã tiến hành nghiên cứu công dụng khử khuẩn, diệt khuẩn, diệt vi-rút của tia UV; tính toán và thiết kế các chi tiết cơ khí bằng phần mềm Autodesk Inventor. Sau đó, chế tạo robot bằng các linh kiện, thiết bị có sẵn trên thị trường, đồng thời có những chi tiết được chế tạo bằng công nghệ in 3D, để lắp ráp lại với nhau một cách hợp thích hợp nhất. Bên cạnh đó, robot được lập trình di chuyển bằng hai phương thức là điều khiển từ xa thông qua sóng RF và tự hành tránh vật cản nhằm tăng tính linh hoạt cho robot trong việc vận hành. Kết quả thực hiện cho thấy robot có khả năng điều khiển mượt mà bằng cả hai phương thức. Quá trình thực nghiệm cho thấy robot có thể hoạt động xuyên suốt 3 giờ 23 phút khi bật hết tất cả các thiết bị. Khả năng khử khuẩn đạt ở mức 61% trong phạm vi 5 mét và hiệu quả đạt cao hơn khi khoảng cách rút ngắn lại. Tạo tiền đề cho sự phát triển các loại robot khử khuẩn, hỗ trợ ngành y tế nói riêng và các lĩnh vực khác nói chung.


6. THIẾT KẾ VÀ CHẾ TẠO MÁY GỌT VỎ KHÓM
Mục tiêu của luận văn này là thiết kế và chế tạo máy gọt khóm tự động nhằm giúp cho quá trình gọt khóm nhanh hơn, gọn hơn, nhẹ hơn, có thể sử dụng trong các cửa hàng, siêu thị. Để thực hiện đề tài này, nhóm tác giả đã nghiên cứu đặc điểm của khóm, các phương pháp gọt khóm khác nhau, tính toán thiết kế kết cấu và chi tiết cơ khí bằng phần mềm Autodesk Inventor. Sau đó, gia công và chế tạo các bộ phận đã thiết kế bằng các công nghệ như in 3D, hàn, tiện,… và lắp ráp chúng lại với nhau. Bên cạnh đó, máy sử dụng cảm biến giúp quá trình vận hành diễn ra an toàn, hạn chế ảnh hưởng xấu đến máy. Kết quả thực nghiệm cho thấy sản phẩm đạt yêu cầu với năng suất hoạt động là 26 giây cho một sản phẩm. Máy gọt vỏ khóm mang đến sự tiện lợi, hiện đại hơn so với các cách gọt vỏ khóm truyền thống thông thường.



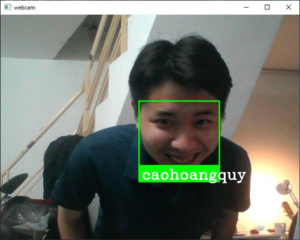
7. XÂY DỰNG HỆ THỐNG QUẢN LÍ NHÂN VIÊN VÀ HỆ THỐNG AN NINH BẰNG CÔNG NGHỆ XỬ LÝ ẢNH
Để tài xây dựng mô hình thực hiện chấm công tự động nhân viên – sinh viên và lưu dữ liệu về Google Sheets. Đồng thời thực hiện cảnh báo tự động khi phát hiện một đối tượng dừng lại quá lâu trước ngôi nhà. Bên cạnh đó, xây dựng và hoạt động thành công trên một máy tính nhúng. Áp dụng tổng hợp các kiến thức đã học trong chuyên ngành Cơ điện tử vào thực tế, tìm hiểu và nghiên cứu thêm các kiến thức về Deep Learning.

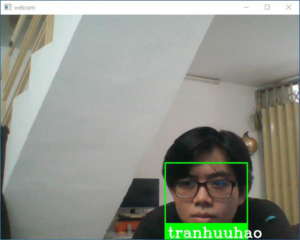
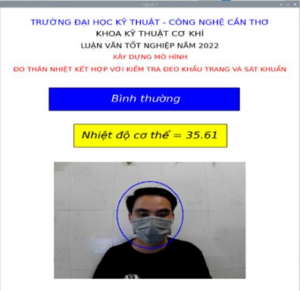
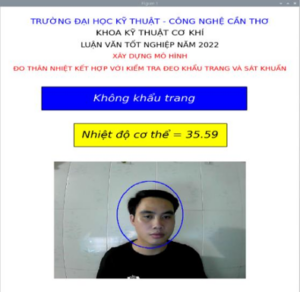
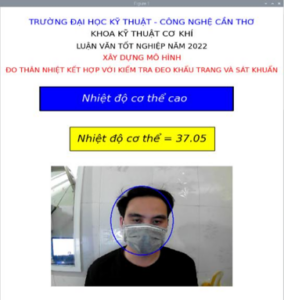
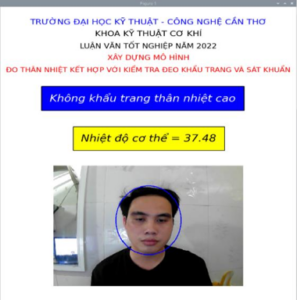
8. XÂY DỰNG MÔ HÌNH ĐO THÂN NHIỆT KẾT HỢP VỚI KIỂM TRA ĐEO KHẨU TRANG VÀ SÁT KHUẨN
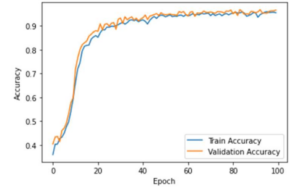
Trong những năm qua đại dịch COVID-19 đã tác động và ảnh hưởng rất nhiều đến các hoạt động của con người. Việc mang khẩu trang, kiểm tra thân nhiệt và sát khuẩn tay đã là điều bắt buộc trong quy tắc 5K của Bộ Y Tế ban hành khuyến cáo người dân tuân thủ để hạn chế lây nhiễm dịch bệnh COVID-19 nhằm bảo vệ sức khỏe cá nhân và cộng động. Trong đề tài này, tác giả sử dụng máy tính nhúng Raspberry Pi 4 để kiểm tra đeo khẩu trang dựa trên trí tuệ nhân tạo, kết hợp đo thân nhiệt sử dụng camera nhiệt và khử khuẩn tay không tiếp xúc. Mô hình kiểm tra đeo khẩu trang được huấn luyện để nhận dạng hai lớp gồm những người đeo khẩu trang và những người không đeo khẩu trang dựa trên thuật toán MobileNetV2 và các thư viện TensorFlow, OpenCV, Matplotlib, … nhằm phát hiện người không đeo khẩu trang theo thời gian thực. Kết hợp với mô hình kiểm tra thân nhiệt không tiếp xúc tác giả sử dụng camera nhiệt MLX 90640 góc rộng để thực hiện đo nhiệt độ trên khuôn mặt lấy những pixel có nhiệt độ cao trên khuôn mặt để so sánh xử lý phát ra cảnh báo. Mô hình khử khuẩn tay không tiếp xúc sử dụng cảm biến hồng ngoại kết hợp với mạch đóng ngắt tải và tạo trễ để phát hiện tay đã đưa vào bộ phần khử khuẩn và thực hiện hiện bơm dung dịch sát khuẩn. Kết quả thử nghiệm mô hình kiểm tra đeo khẩu trang khả năng nhận diện đạt độ chính xác 95%, mô hình kiểm tra đo thân nhiệt sử dụng camera nhiệt sai số nhiệt độ 0.68°C so với thiết bị đo nhiệt độ thông thường, mô hình khử khuẩn tay không tiếp xúc hoạt động ổn định.
9. XÂY DỰNG HỆ THỐNG HỖ TRỢ ĐIỂM DANH SINH VIÊN VÀ CHẤM TIẾT GIẢNG TRƯỜNG ĐẠI HỌC – KỸ THUẬT CÔNG NGHỆ CẦN THƠ
Luận văn này trình bày phương pháp, quá trình xây dựng hệ thống điểm danh sinh viên và chấm tiết giảng viên thông qua quản lý trên web server, thiết kế mô hình sản phẩm máy đo thân nhiệt kết hợp sát khuẩn và công nghệ RFID dùng điểm danh và chấm tiết giảng trong môi trường giáo dục tại Trường Đại học Kỹ thuật – Công nghệ Cần Thơ.



10. NGHIÊN CỨU VÀ PHÁT TRIỂN GIẢI PHÁP GIÁM SÁT THỜI GIAN THỰC CHO HỆ THỐNG LÀM MÁT BẰNG NHỚT VÀ NƯỚC TUẦN HOÀN TRONG MÔ HÌNH THỬ KÍN CÁC PHỐT LÀM KÍN HỆ TRỤC CHÂN VỊT, HỆ TRỤC LÁI DO CÔNG TY ANH TRÍ TUỆ SẢN XUẤT
Trong công cuộc cách mạng công nghiệp 4.0, việc ứng dụng một số hệ thống tự động hóa, hệ thống điều khiển từ xa, hệ thống giám sát thời gian thực,… cho công nghiệp đang là một xu hướng tất yếu. Các hệ thống này thay thế con người thực hiện các công việc trong nhiều môi trường khác nhau. Thông qua đó chúng ta có thể giám sát chúng hoạt động để hỗ trợ chúng ta hơn trong việc thu thập dữ liệu. Ở đề tài này sử dụng Node-RED để thiết kế giao diện. Giao diện này được hoạt động trên Raspberry Pi 3+. Khi khởi động hệ thống thì hệ thống sẽ tự động kết nối vào thiết bị. Đề tài “Nghiên cứu và phát triển giải pháp giám sát thời gian thực cho hệ thống làm mát bằng nhớt và nước tuần hoàn trong mô hình thử kín các phốt làm kín hệ trục chân vịt, hệ trục lái do Công Ty Anh Trí Tuệ sản xuất” thực hiện giải quyết những nhiệm vụ bao gồm các nội dung sau: Đọc giá trị cảm biến, tín hiệu không dây được truyền tải qua mạng truyền thông của PLC. Từ đó chuyển dữ liệu lên giao diện NodeRED hoạt động

11. HỆ THỐNG PHÂN LOẠI SẢN PHẨM BẰNG MÃ QR CODE
Ngày nay cùng với sự phát triển của các ngành khoa học kỹ thuật, kỹ thuật điện tử mà trong đó điều khiển tự động đóng vai trò hết sức quan trọng trong mọi lĩnh vực khoa học kỹ thuật, quản lý, công nghiệp tự động hóa , cung cấp thông tin… do đó chúng ta phải nắm bắt và vận dụng nó một cách có hiệu quả nhằm góp phần vào sự phát triển của nền khoa học kỹ thuật thế giới nói chung và trong kỹ thuật điều khiển tự động nói riêng. Xuất phát từ những buổi tham quan các doanh nghiệp sản xuất, các khu công nghiệp, các đơn vị vận chuyển hàng hóa,… chúng em đã thấy được nhiều khâu cần ứng dụng “phân loại sản phẩm bằng mã QR code” trong quá trình sản xuất. Từ những vấn đề đã được nhìn thấy trong thực tế và những kiến thức đã học, chúng em muốn xây dựng một mô hình sử dụng băng chuyền kết hợp với xử lý ảnh nhận diện QR code. Nhằm nâng cao năng suất, giảm nhân công lao động, làm việc liên tục.


12. THIẾT KẾ VÀ THI CÔNG ROBOT HỖ TRỢ Y TẾ
Đề tài được nghiên cứu dựa vào khai thác thiết kế mô hình 3D và tính toán lựa chọn động cơ để có được công suất cần thiết để xe có thể chở tải tối đa 30 kg. Nghiên cứu thêm lĩnh vực sử dụng sóng điều khiển của tay cầm điều khiển Flysky I6 để tối ưu thêm khả năng điều khiển một cách tối ưu tránh độ trễ cũng như thao tác dễ dàng hơn.


13. XÂY DỰNG MÔ HÌNH PHÂN LOẠI SẢN PHẨM LỖI DỰA TRÊN MẠNG NƠ-RON TÍCH CHẬP SỬ DỤNG CAMERA CÔNG NGHIỆP VÀ PLC S7-1200
Đề tài nhằm mục tiêu xây dựng mô hình phân loại sản phẩm lỗi dựa trên mạng nơ-ron tích chập, với đối tượng được kiểm nghiệm là vỉ thuốc (phát hiện lỗi đóng gói thiếu viên của vỉ thuốc). Với mục đích xây dựng mô hình sản phẩm có thể áp dụng trong công nghiệp nên thiết bị điều khiển chính được sử dụng trong mô hình là PLC S7-1200 của hãng Siemens và thiết bị thu nhận ảnh là camera công nghiệp Basler (acA1920-25um), cùng với các thiết bị công nghiệp bổ trợ khác. Để phân loại được sản phẩm lỗi, mô hình sử dụng thuật toán Convolutional Neural Network (CNN). Mô hình được thiết kế với giao diện điều khiển và giám sát trực quan, người dùng có thể thao tác dễ dàng. Dữ liệu phân loại và hình ảnh lỗi được lưu lại trên máy tính thuận tiện cho việc có thể xem lại khi cần. Kết quả của quá trình chạy thực nghiệm cho thấy mô hình hoạt động ổn định, độ chính xác trong quá trình phân loại vỉ thuốc lỗi là 98%, qua đó cho thấy mô hình đã đạt được những mục tiêu ban đầu đặt ra.


14. THIẾT KẾ VÀ THI CÔNG THIẾT BỊ PHUN KHỬ KHUẨN TRÊN KHÔNG
Quadcopter, hay còn được gọi là Quadrotor Helicopter, là một dạng máy bay lên thẳng được nâng bởi bốn cánh quạt đặt trên một khung Chữ Thập. Mô hình được xây dựng có khả năng phun khử khuẩn. Những chuyển động của mô hình được đo đạc thông qua bộ IMU (Inertial Measurement Unit, còn được gọi là bộ đo lường quán tính) bao gồm một con quay hồi chuyển hai trục và cảm biến độ nghiêng ba trục và đưa về vi điều khiển thực hiện thuật toán điều khiển PID cho 4 động cơ thông qua phương pháp điều chế độ rộng xung PWM.