
Nhằm tạo động lực học tập, nghiên cứu và định hướng nghề nghiệp cho sinh viên, Khoa KTCK trân trọng giới thiệu tới các em một số đồ án và mô hình mà sinh viên của Khoa đã thực hiện:
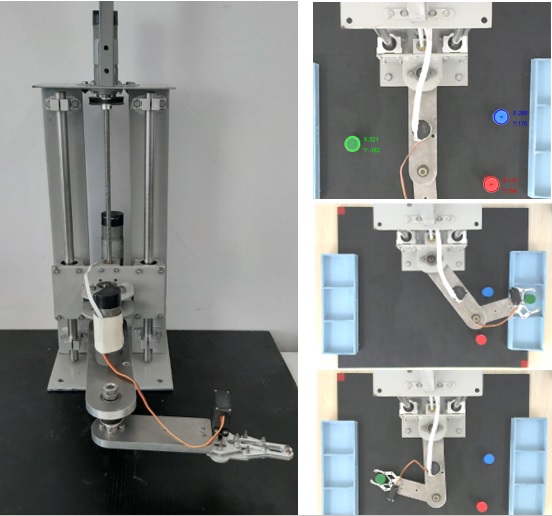
1. Tên đề tài: CẢI TIẾN MÔ HÌNH FISCHERTECHNIK
Tóm tắt: Luận văn này tập trung cải tiến gắp vật ở vị trí bất kì nằm trong vùng làm việc của cánh tay robot 3 bậc tự do. Nghiên cứu kỹ thuật xử lý ảnh, tạo giao diện tương tác giữa người dùng với LabVIEW.
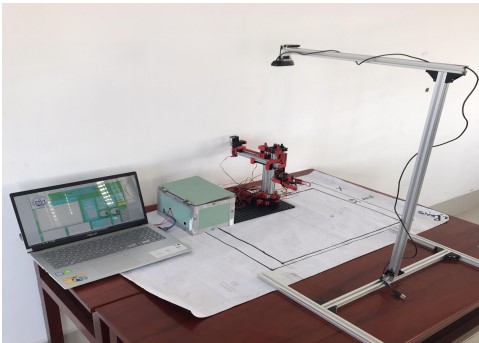
Hình ảnh 1: Mô hình FISCHERTECHNIK
2. Tên đề tài: XÂY DỰNG VÀ ĐIỀU KHIỂN MÔ HÌNH BỘ AUTOSAMPLER.
Tóm tắt: Thiết kế được mô hình thực tế của bộ lấy mẫu tự động. Thiết kế được giao diện điều khiển trên phần mềm LabVIEW để điều khiển mô hình thực tế. Mâm xoay của mô hình thực tế di chuyển đến đúng vị trí ly cần bơm. Lượng chất lỏng bơm vào ly đúng với tỷ lệ đã được lập trình sẵn.

Hình ảnh 2: Mô hình bộ AUTOSAMPLER
3. Tên đề tài: XÂY DỰNG MÔ HÌNH THÍ NGHIỆM ĐIỀU KHIỂN NHIỆT ĐỘ MẪU PHỤC VỤ HỌC TẬP MỘT SỐ MÔN HỌC CHUYÊN NGÀNH ĐIỀU KHIỂN.
Tóm tắt: Đề tài là xây dựng ra thành phẩm mô hình điều khiển nhiệt độ. Qua đó mô hình hóa và mô phỏng lại lại mô hình bằng phương pháp lý thuyết, thực nghiệm. Áp dụng nhiều giải thuật điều khiển như On/Off, PID, Fuzzy,… để điều khiển nhiệt độ và so sánh đáp ứng giữa các giải thuật.
Hình ảnh 3: Mô hình điều khiển nhiệt độ
4. Tên đề tài: THIẾT KẾ MÔ HÌNH SẤY TRÁI CÂY BẰNG NĂNG LƯỢNG MẶT TRỜI
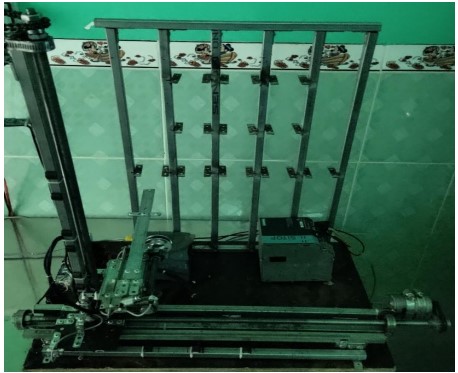
Tóm tắt: Tìm hiểu, tính toán, thiết kế mô hình sấy bằng năng lượng Mặt Trời kết hợp điều khiển và giám sát nhiệt độ bằng phương pháp PID trong PLC S7 200. So sánh sản phẩm sấy được trên mô hình so với sấy bằng cách phơi trực tiếp.

Hình ảnh 4: Mô hình sấy trái cây bằng năng lượng mặt trời
5. Tên đề tài: Thiết Kế Và Thi Công Mô Hình Bãi Giữ Xe Ô Tô Tự Động Dùng PLC
Tóm tắt: Thiết kế và xây dựng mô hình hệ thống cơ khí. Sử dụng WinCC để giám sát, điều khiển và thu thập dữ liệu. Giao tiếp PLC với máy tính. Xây dựng thuật toán và chương trình điều khiển mô hình. Quan trọng hơn là phần lập trình điều khiển cất và lấy xe tự động
Hình ảnh 5: Mô hình bãi giữ xe ô tô tự động
6. Tên đề tài: XÂY DỰNG MÔ HÌNH SCADA CHO HỆ THỐNG AO NUÔI CÁ ỨNG DỤNG CÔNG NGHỆ RAS.
Tóm tắt: Tìm hiểu rõ về PLC M221 của Schneider, các cảm biến đo nhiệt độ, pH, nồng độ Oxy hòa tan, độ đục của nước. Tìm hiểu rõ về ngôn ngữ lập trình LAD trên Somachine Basic. Nắm được kiến thức về phần mềm Easybuilder 8000. Thiết kế được mô hình điều khiển và giám sát thực tế trên HMI Weintek MT6070IP. Mô hình đáp ứng được yêu cầu điều khiển và giám sát các van, bơm. Hiển thị được các thông số của cảm biến, đáp ứng được nhu cầu của SCADA trong công nghệ RAS.

Hình ảnh 6: Mô hình SCADA cho hệ thống nuôi cá
7. Tên đề tài: ĐIỀU KHIỂN MỰC NƯỚC BỒN ĐƠN SỬ DỤNG PID.
Tóm tắt: Giữ ổn định mức nước đặt trước trong bồn của hệ bồn đơn bằng phương pháp PID. Nghiên cứu trạng thái ổn định của bồn khi thay đổi các thông số của hệ thống. Xây dựng giao diện Labview Thiết kế, mô phỏng hệ thống điều khiển trên phần mềm Factory I/O. Xây dựng mô hình hệ thống điều khiển vị trí của động cơ DC sử dụng PLC S7 – 1200.

Hình ảnh 7: Mô hình điều khiển mực nước bồn đơn
8. Tên đề tài: TÌM HIỂU CẢM BIẾN ỨNG DỤNG TRONG HỆ BĂNG TẢI ĐẾM SẢN PHẨM.
Tóm tắt: Đề tài là mô hình đếm và phân loại sản phẩm theo chiều cao được sử dụng phổ biến trong công nghiệp, nghiên cứu về PLC S7-1200, cảm biến tiệm cận, cảm biến quang, cảm biến laser, van khí nén 5/2, xi lanh khí nén, relay kiếng cùng với một số phần mềm để kết nối với PLC bao gồm WinCC, TIA Portal V15, Factory I/O.
Hình ảnh 8: Mô hình hệ băng tải đếm sản phẩm
9. Tên đề tài: ĐIỀU KHIỂN LƯU LƯỢNG CHẤT LỎNG SỬ DỤNG PID.
Tóm tắt: Mô phỏng và xây dựng mô hình thực tế bộ mô hình điều khiển lưu lượng nước sử dụng bộ điều khiển PID thông qua PLC và biến tần.

Hình ảnh 9: Mô hình điều khiển lưu lượng chất lỏng
10. Tên đề tài: CHẾ TẠO MÔ HÌNH ĐIỀU KHIỂN TỐC ĐỘ ĐỘNG CƠ SERVO.
Tóm tắt: Xây dựng mô hình hệ thống điều khiển vị trí của động cơ Servo DC sử dụng PLC S7 – 1200. Xây dựng bộ điều khiển PID ghép tầng để điều khiển động cơ Servo DC. Khảo sát và đánh giá hiệu quả của bộ điều khiển. Thiết kế, mô phỏng hệ thống điều khiển trên phần mềm Factory IO. Xây dựng giao diện LabVIEW.

Hình ảnh 10: Mô hình điều khiển tốc độ động cơ servo
11. Tên đề tài: XE TỰ HÀNH SỬ DỤNG RASPBERRY PI VÀ CAMERA.
Tóm tắt: Đề tài là xây dựng mô hình xe tự hành dùng camera để phân biệt các biển báo sau đó điều khiển động cơ giúp cho mô hình di chuyển một cách chính xác. Từ đó áp dụng vào thực tế như xe tự hành sử dụng ngoài đường cũng như áp dụng vào sản xuất như xe chở hàng có thể di chuyển đến điểm mình muốn mà không phải tốn công điều khiển từ đó tiết kiệm được chi phí nhân công cũng như tính an toàn được nâng cao.

Hình ảnh 11: Mô hình xe tự hành
12. Tên đề tài: NGHIÊN CỨU, THIẾT KẾ HỆ THỐNG CÂN KHỐI LƯỢNG SẢN PHẨM TRÊN BĂNG TẢI.
Tóm tắt: Nghiên cứu và thiết kế hệ thống cân được sản phẩm trên băng truyền. Đo được cân nặng bằng Loadcell kết nối với Module HX711 để chuyển tính hiệu điện áp sang tín hiệu số. Đo được khoảng cách của sản phẩm khi giao tiếp với Module L298. Tạo cơ hội tìm hiểu, thực hành một cách thiết thực những nội dung lý thuyết trong các môn đã học. Áp dụng những nghiên cứu này vào một bài thực hành cụ thể để hiểu rõ hơn lý thuyết, thu góp kinh nghiệm thực hành thực tế.
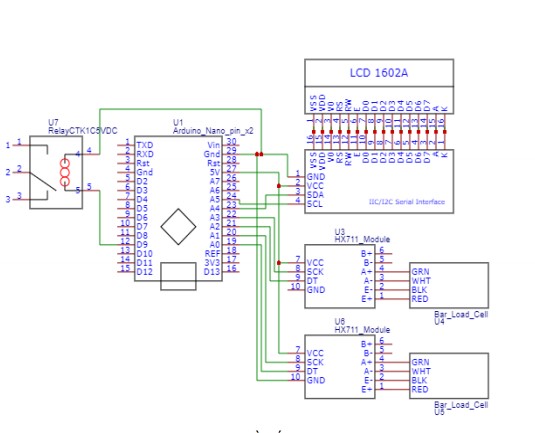
Hình ảnh 12: Mô hình cân khối lượng sản phẩm trên băng tải
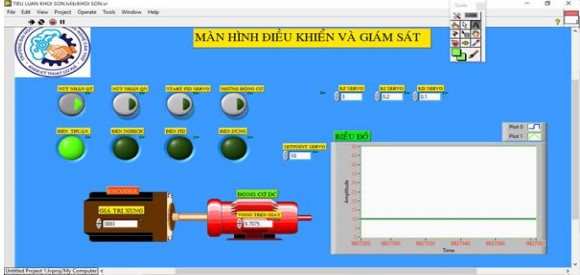
13. Tên đề tài: NGHIÊN CỨU MÁY TÁCH TÂM SEN VÀ ĐIỀU KHIỂN NHIỆT ĐỘ QUY TRÌNH SẤY THÀNH PHẨM.
Tóm tắt: Phần thiết kế, gia công các chi tiết của máy tách tâm sen một cách hoàn hảo tỉ mỉ và máy hoạt động liên tục ổn định có độ chính xác cao cho các ra thành phẩm không bị sai sót hư hỏng. Đặc biệt máy gần như không cần tới người điều khiển hay giám sát xuyên suốt. Qua đó tiết kiệm được nguồn nhân lực, thời gian và không gian. Đồng thời thông tin nhiệt độ của buồng sấy thành phẩm luôn rõ ràng vì được cập nhật liên tục và việc điều khiểu nhiệt độ của buồng sấy theo nhu cầu cũng đều hiển thị qua màn hình LCD.
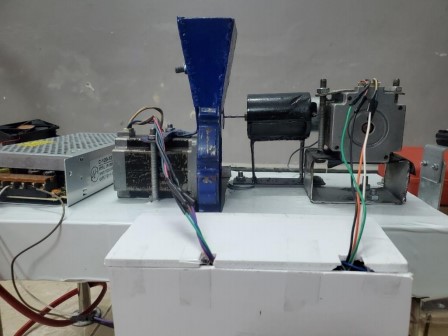
Hình ảnh 13: Mô hình tách tâm sen và điều khiển quy trình thành phẩm
14. Tên đề tài: TÍNH TOÁN, THIẾT KẾ MÔ HÌNH MÁY PHÂN LOẠI KÍCH THƯỚC QUẢ CHANH.
Tóm tắt: Mục tiêu của đề tài là nghiên cứu, tính toán, thiết kế máy phân loại kích thước quả chanh và vẽ phác thảo mô hình máy để hiểu rõ nguyên lý hoạt động và tiện ích của máy được áp dụng trong sản xuất nông nghiệp.
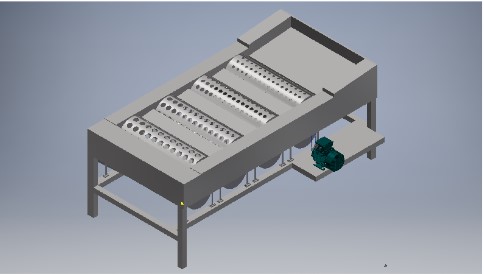
Hình ảnh 14: Mô hình phân loại kích thước quả chanh
15. Tên đề tài: THIẾT KẾ MÔ HÌNH SMARTHOME ỨNG DỤNG VÀO VIỆC QUẢN LÝ MỘT DÃY NHÀ TRONG MỘT CHUNG CƯ CAO CẤP.
Tóm tắt: Thiết kế hệ thống báo cháy, báo khói để cảnh báo khẩn cấp và có còi báo động khi ở nhà khi xảy ra cháy. Thiết kế hệ thống chống trộm (có hẹn giờ-cảm biến chuyển động). Thiết kế hệ thống khóa cửa bằng thẻ từ. Điều khiển đèn bằng smartphone và có điều khiển bằng giọng nói thông qua các phần mềm điện thoại Thu thập data và điều khiển bằng smartphone. Xử lý máy chế khi trời mưa.

Hình ảnh 15: Mô hình SMARTHOME
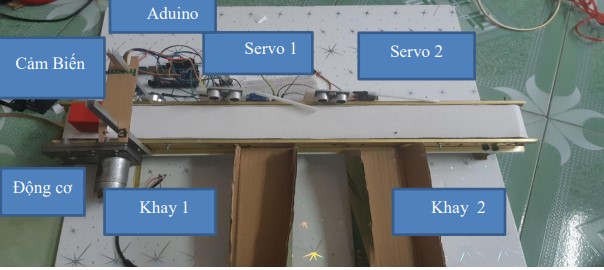
16. Tên đề tài: NGHIÊN CỨU, PHÁT TRIỂN VIỆC QUẢN LÝ VÀ GIÁM SÁT SINH VIÊN QUA RFID KẾT HỢP XỬ LÝ ẢNH.
Tóm tắt: Thiết kế hệ thống đọc dữ liệu thẻ RFID thông qua cổng COM. Xây dựng giao diện cơ sở dữ liệu mẫu để quản lý. Xây dựng giao diện nhận dạng sinh viên. Nhận dạng vào cảnh báo nếu chưa đúng. Lưu lại các thông số cần thiết.
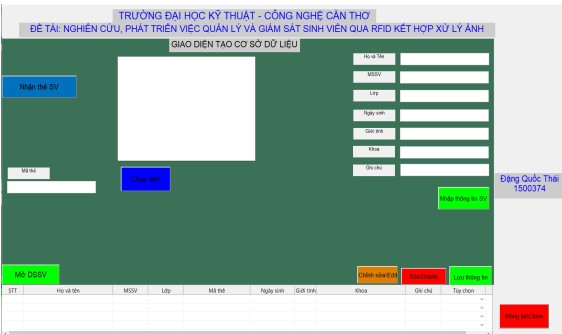
Hình ảnh 16: Mô hình quản lý và giám sát sinh viên qua RFID kết hợp xử lý ảnh
17. Tên đề tài: PHÂN LOẠI SẢN PHẨM TRÊN BĂNG CHUYỀN DỰA VÀO CẢM BIẾN MÀU SẮC ĐIỀU KHIỂN BẰNG ARDUINO.
Tóm tắt: Đề tài là nghiên cứu phân loại màu sản phẩm nên nhiệm vụ nghiên cứu gồm: Mô hình thực tế. Thiết kế và thi công mô hình phân loại sản phẩm theo màu sắc sử dụng vi xử lý. Phân loại đƣợc các màu sắc của sản phẩm theo yêu cầu. Thiết kế giao diện giám sát sự hoạt động của mô hình và hiển thị kết quả của từng sản phẩm đƣợc phân loại.
Hình ảnh 17: Mô hình phân loại sản phẩm theo màu sắc
18. Tên đề tài: Ứng dụng IoT xây dựng hệ thống tưới cây thông minh cho vườn mít tại huyện Cái Tắc, tỉnh Hậu Giang.
Tóm tắt: Điều khiển được các thiết bị tưới hoặc cơ cấu chấp hành (bơm và các van điện từ) thông qua điện thoại. Sản phẩm có tính ứng dụng thực tế (lắp đặt và vận hành thử nghiệm tại vườn). Đảm bảo các chức năng của một hệ thống tự động bao gồm: tưới theo chế độ điều khiển bằng tay (manual), chức năng cảnh báo hoặc bảo vệ an toàn của hệ thống Mức độ hiệu quả kinh tế cũng được khảo sát và đánh giá nhằm tối ưu chi phi đầu tư, lắp đặt, vận hành bảo trì.

Hình ảnh 18: Mô hình tưới cây thông minh
19. Tên đề tài: XÂY DỰNG MÔ HÌNH DẬP TOLE BẰNG KHÍ NÉN.
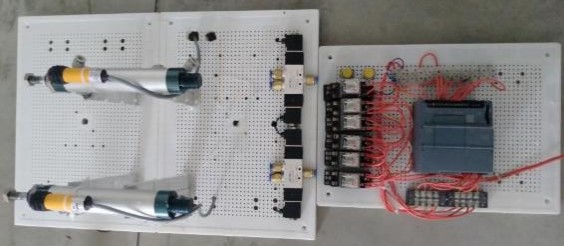
Tóm tắt: Đề tài là xây dựng mô hình khí nén, điều khiển một cách chính xác hành trình, thời gian ra vào của xy lanh khí nén thông qua sự điều khiển của PLC kết nối với van khí nén 5/2 qua rely kính, giúp điều chỉnh và định hình vật liệu tole theo hình dạng đã định sẵn, thiết kế giao diện điều khiển tự động. Từ những ưu điểm đó giúp ta tiết kiệm được thời gian, nhân công trong quá trình vận hành sản xuất của công ty, nhà máy, xí nghiệp,… tăng khả năng hoạt động của nhà máy và giảm chi phí cho việc vận hành.
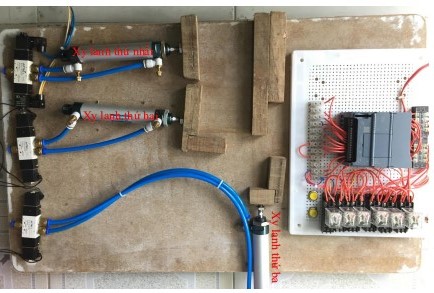
Hình ảnh 19: Mô hình dập tole bằng khí nén
20. Tên đề tài: THIẾT KẾ MÔ HÌNH ĐÈN GIAO THÔNG THÔNG MINH Ở CÁC TRỤC NGÃ TƯ ĐỂ GIẢI QUYẾT TRÌNH TRẠNG KẸT XE Ở NHỮNG GIỜ CAO ĐIỂM.
Tóm tắt: Thiết kế mô hình đèn giao thông thông minh ở các trục ngã tư để giải quyết trình trạng kẹt xe ở những giờ cao điểm” là ứng dụng công nghệ cao điện tử, tin học và viễn thông để điều hành và quản lý hệ thống giao thông vận tải (chủ yếu là ô tô), nhằm giảm thiểu ùn tắc, tai nạn, tăng cường năng lực vận tải hành khách…Có như thế mới đảm bảo được vấn đề giao thông hiện nay cũng như tương lai và an toàn giao thông một cách hữu hiệu. Chính vì vậy mà tôi chọn đề tài “Thiết kế mô hình đèn giao thông thông minh ở các trục ngã tư để giải quyết trình trạng kẹt xe ở những giờ cao điểm”. Kết nối phần mềm Labview với vi điều khiển để điều khiển đèn giao thông. Dùng camera xử lý ảnh đếm số lượng xe lưu thông . Điều khiển đèn giao thông chế độ bằng tay và tự động. Giám sát đèn giao thông bằng Labview.

Hình ảnh 20: Mô hình đèn giao thông thông minh
21. Tên đề tài: THIẾT KẾ VÀ CHẾ TẠO MÔ HÌNH BÃI GIỮ XE TỰ ĐỘNG DỰA TRÊN CAMERA NHẬN DẠNG BIỂN SỐ XE
Tóm tắt: Nghiên cứu và áp dụng những công nghệ mới theo xu hướng phát triển, tìm hiểu về xử lý ảnh, công nghệ bảo mật RFID, giao thức truyền thông máy tính và vi điều khiển,… áp dụng để xây dựng một hệ thống bãi xe có tính bảo mật cao, dễ sử dụng, giao diện thân thiện với người dùng, khắc phục những nhược điểm thường gặp của các hệ thống giữ xe truyền thống.

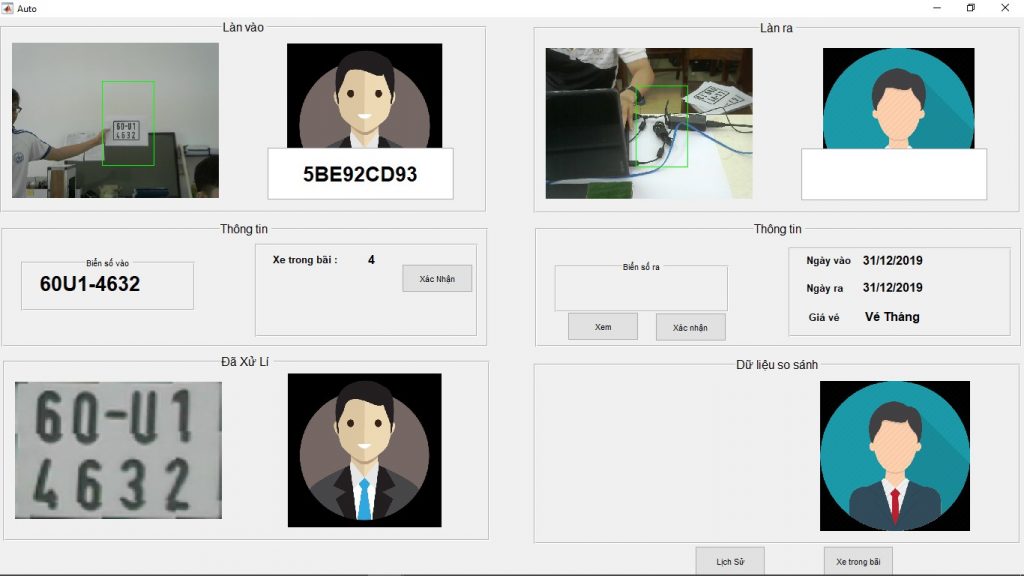
Hình ảnh 21: Mô hình bãi giữ xe tự động
22. Tên đề tài: THIẾT KẾ VÀ CHẾ TẠO MÔ HÌNH ROBOT SCARA PHÂN LOẠI SẢN PHẨM THEO MÀU SẮC VÀ HÌNH DẠNG
Tóm tắt: Tìm hiểu các khái niệm và kiến thức cơ bản về Robot, thiết kế và chế tạo mô hình Robot Scara 3 bậc tự do hoạt động linh hoạt và chính xác, thiết kế mạch điều khiển và giao diện điều khiển cho Robot, xây dựng giải thuật PID điều khiển vị trí động cơ DC, ứng dụng xử lý ảnh vào mô hình để phân loại sản phẩm.
Hình ảnh 22: Mô hình robot SCARA phân loại sản phẩm theo màu sắc và hình dạng
23. Tên đề tài: THIẾT KẾ HỆ THỐNG GIÁM SÁT ĐIỀU KIỆN TỰ NHIÊN VÀ DINH DƯỠNG CỦA VƯỜN RAU THỦY CANH
Tóm tắt: Thiết kế hệ thống theo dõi các yếu tố tự nhiên bên trong nhà lưới vườn rau thủy canh như: Nhiệt độ, độ ẩm không khí, cường độ ánh sáng, nhiệt độ dung dịch, nồng độ hòa tan chất rắn trong dung dịch dinh dưỡng. Thiết kế hệ thống điều khiển các thiết bị: máy bơm dung dịch, đèn, quạt, phun sương, máy che. Áp dụng tổng hợp các kiến thức đã học trong chuyên ngành Cơ điện tử vào thực tế, tìm hiểu và nghiên cứu thêm các kiến thức về IoT.


Hình ảnh 23: Mô hình giám sát điều kiện tự nhiên và dinh dưỡng vườn rau thủy canh
24. Tên đề tài: THIẾT KẾ CHẾ TẠO MÁY CẮT RAU CỦ TỰ ĐỘNG
Tóm tắt: Luận văn này trình bày cách tính toán và thiết kế chế tạo máy cắt rau củ tự động. Nhằm tiết kiệm thời gian và sức lao động. Với mục tiêu là máy nhỏ gọn phù hợp mọi không gian nhà bếp, các nhà hàng, quán ăn hay một thành phần trong dây chuyền sản xuất. Mô hình được điều khiển và hoạt động dựa trên board điều khiển trung tâm là Arduino Mega 2560, cùng với đó là các module điều khiển động cơ, module bluetooth HC05. Lập trình ứng dụng điều khiển máy trên Smartphone.
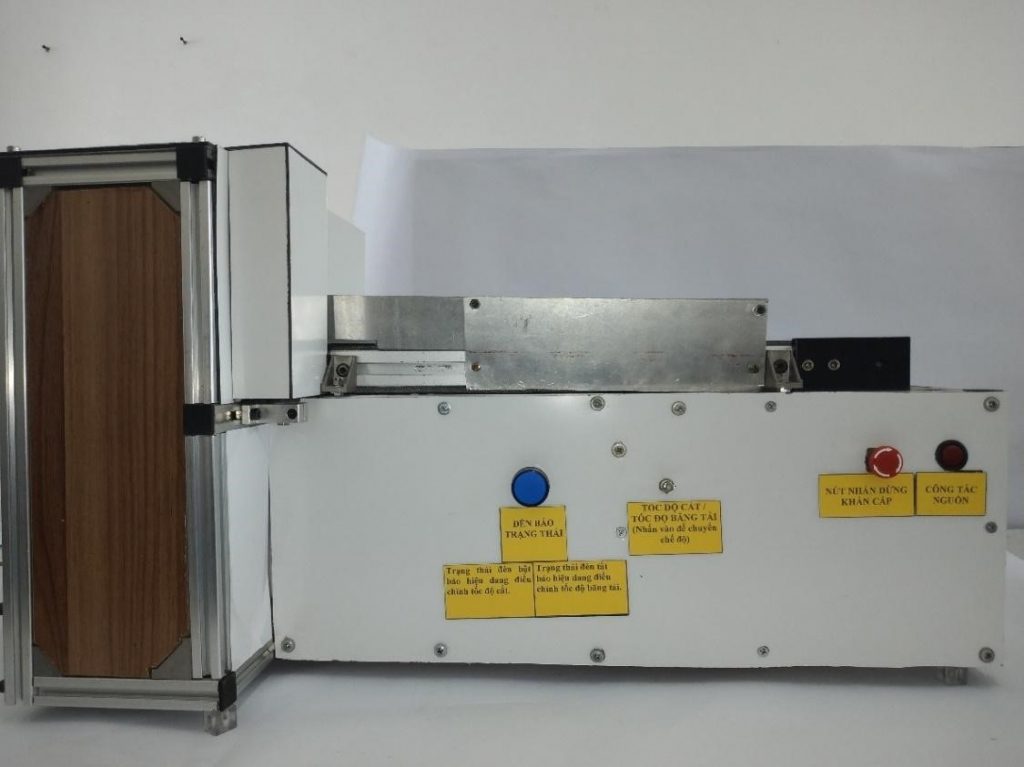

Hình ảnh 24: Mô hình cắt rau củ tự động
25. Tên đề tài: THIẾT KẾ, CHẾ TẠO MÔ HÌNH PHÂN LOẠI SẢN PHẨM THEO MÀU SẮC
Tóm tắt: Luận văn “Thiết kế, chế tạo mô hình phân loại sản phẩm theo màu sắc” trình bày các phương pháp, quá trình thiết kế, chế tạo mô hình phân loại sản phẩm theo màu sắc. Đồng thời, kết hợp với đề tài luận văn tốt nghiệp đại học “Thiết kế, chế tạo mô hình đóng gói và sắp xếp hàng hóa” của bạn Phạm Thành Đô, lớp CDT0116 để mô tả dây chuyền sản xuất trong thực tế.
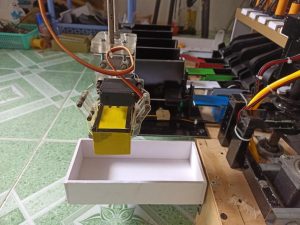

Hình ảnh 25: Mô hình phân loại sản phẩm theo màu sắc
26. Tên đề tài: THIẾT KẾ, CHẾ TẠO MÔ HÌNH ĐÓNG GÓI VÀ SẮP XẾP HÀNG HÓA
Tóm tắt: Luận văn “Thiết kế, chế tạo mô hình đóng gói và sắp xếp hàng hóa” kết hợp với đề tài luận văn tốt nghiệp đại học của bạn Nguyễn Thành Luân, sinh viên lớp Cơ điện tử Khóa 4, Khoa Kỹ thuật cơ khí, Trường Đại học Kỹ thuật – Công nghệ Cần Thơ để mô tả dây chuyền sản xuất thực tế từ khâu phân loại đến khâu đóng gói và sắp xếp hàng hóa. Đề tài luận văn trình bày các phương pháp, quá trình thiết kế, chế tạo mô hình đóng gói và sắp xếp hàng hóa.

Hình ảnh 26: Mô hình đóng gói và sắp xếp hàng hóa
27. Tên đề tài: TÍNH TOÁN, THIẾT KẾ KHUÔN ÉP SẢN PHẨM NHỰA TRONG THỰC PHẨM
Tóm tắt: Nghiên cứu về cách thiết kế một bộ khuôn cũng như việc sử dụng phần mềm inventor để tối ưu hóa thiết kế.
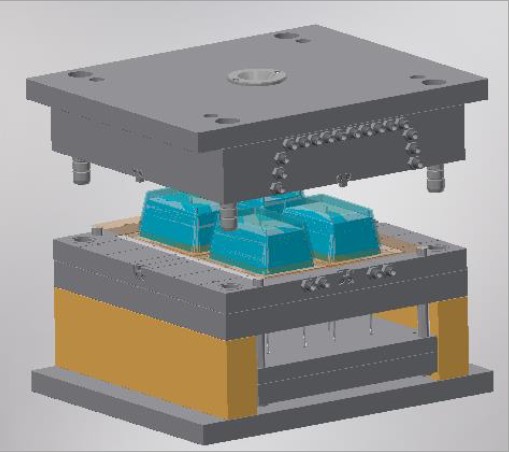
Hình ảnh 27: Mô hình khuôn ép sản phẩm nhựa
28. Tên đề tài: CHẾ TẠO XE HAI BÁNH TỰ CÂN BẰNG
Tóm tắt: Tiểu luận này trình bày phương pháp, quá trình thiết kế chế tạo xe hai bánh tự cân bằng di chuyển trên địa hình phẳng, sử dụng Arduino kết nối với Smartphone để điều khiển xe.
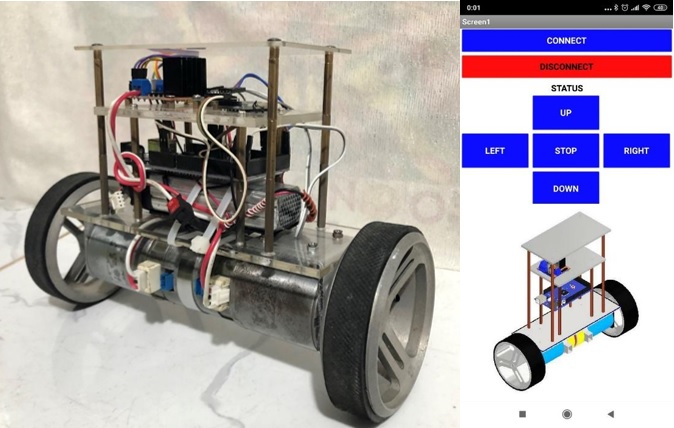
Hình ảnh 28: Mô hình xe hai bánh tự cân bằng
29. Tên đề tài: THIẾT KẾ CHẾ TẠO SCARA PARALLEL ROBOT
Tóm tắt: Tiểu luận này trình bày cách tính toán và thiết kế chế tạo Scara Parallel Robot (Robot Scara song song). Nhằm phục vụ nhu cầu sản xuất tự động. Với mục tiêu là robot nhỏ gọn chắc chắn hoạt động ổn định ứng dụng được các môi trường học tập nghiên cứu cũng như sản xuất. Mô hình được điều khiển và hoạt động dựa trên board điều khiển trung tâm là Arduino Nano, nhận tín hiệu từ camera.
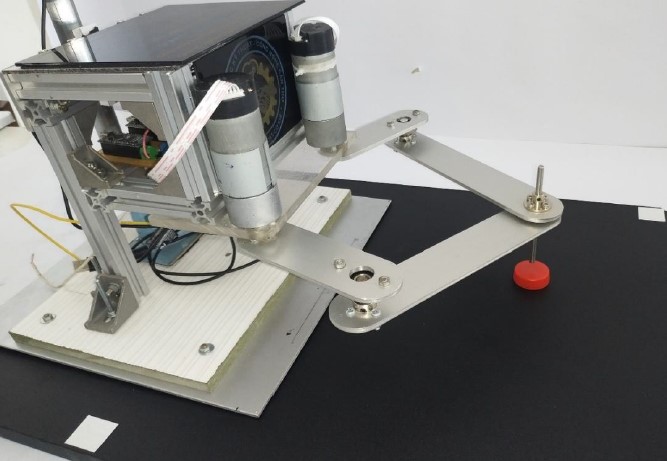
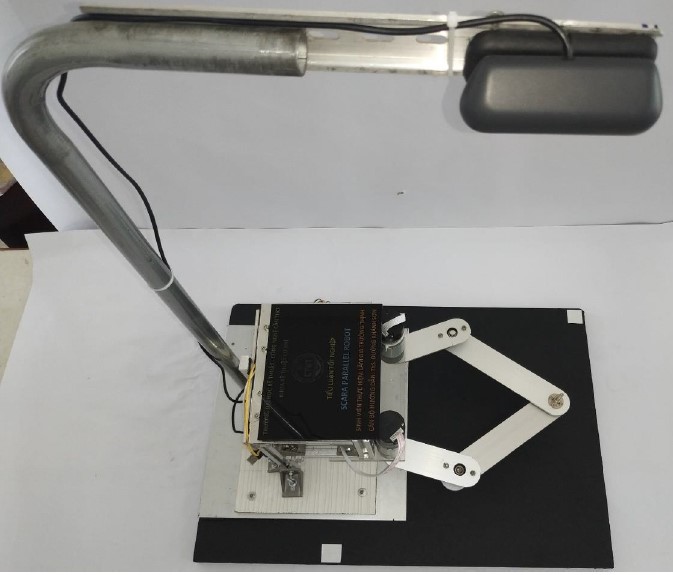
Hình ảnh 29: Mô hình SCARA PARALLEL ROBOT
30. Tên đề tài: CHẾ TẠO ROBOT VẼ DI CHUYỂN BẰNG BÁNH OMNI
Tóm tắt: Tiểu luận này trình bày phương pháp, quá trình thiết kế và chế tạo robot vẽ di chuyển bằng bánh Omni mà không bị giới kích thước làm việc, sử dụng Arduino kết nối với Smartphone hoặc máy tính để điều khiển robot.
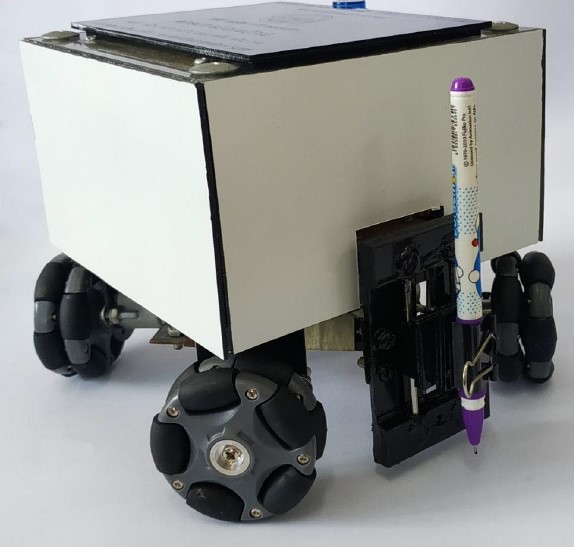
Hình ảnh 30: Mô hình ROBOT vẽ di chuyển bằng bánh OMNI