
Một số Đồ án/TTNN của sinh viên Khoa Kỹ thuật cơ khí năm 2020-2024
Nhằm tạo động lực học tập, nghiên cứu và định hướng nghề nghiệp cho sinh viên, Khoa KTCK trân trọng giới thiệu tới các em một số đồ án và mô hình mà sinh viên của Khoa đã thực hiện:
A – THỰC TẬP TỐT NGHIỆP
1.Tên đề tài: QUY TRÌNH BẢO DƯỠNG VÀ SỮA CHỬA XE Ô TÔ
Tác giả thực hiện: Phan Thế Khải MSSV: 2000645
Ngành: Công nghệ Kỹ thuật Cơ điện tử
Tóm tắt:
Mục Tiêu Nghiên Cứu:
– Nắm được về quy trình bảo dưỡng xe ô tô.
– Nắm bắt được dịch vụ ô tô là như thế nào hiểu được cách thức kinh doanh quy trình sữa chữa của garage và có thể khắc phục những lỗi cơ bản của xe ô tô
– Nhận dạng được những lỗi triệu chứng mà ô tô mắc phải và cách khắc phục cơ bản
MỘT SỐ PHƯƠNG PHÁP NGHIÊN CỨU CHÍNH
Phương Pháp Nghiên Cứu Thực Tế (Empirical Research):
– Mô Hình Nghiên Cứu Sự Kiện (Event Study):
– Phân tích các sự kiện và hoạt động trong quy trình bảo dưỡng và sửa chữa để xác định tác động và tương tác giữa các yếu tố khác nhau.
Phương Pháp Nghiên Cứu Chất Lượng Dịch Vụ (Service Quality Research):
– Khảo Sát Khách Hàng và Nhân Viên:
– Tiến hành khảo sát để đánh giá chất lượng dịch vụ từ góc độ của khách hàng và nhân viên, đặc biệt là trong quy trình bảo dưỡng và sửa chữa.

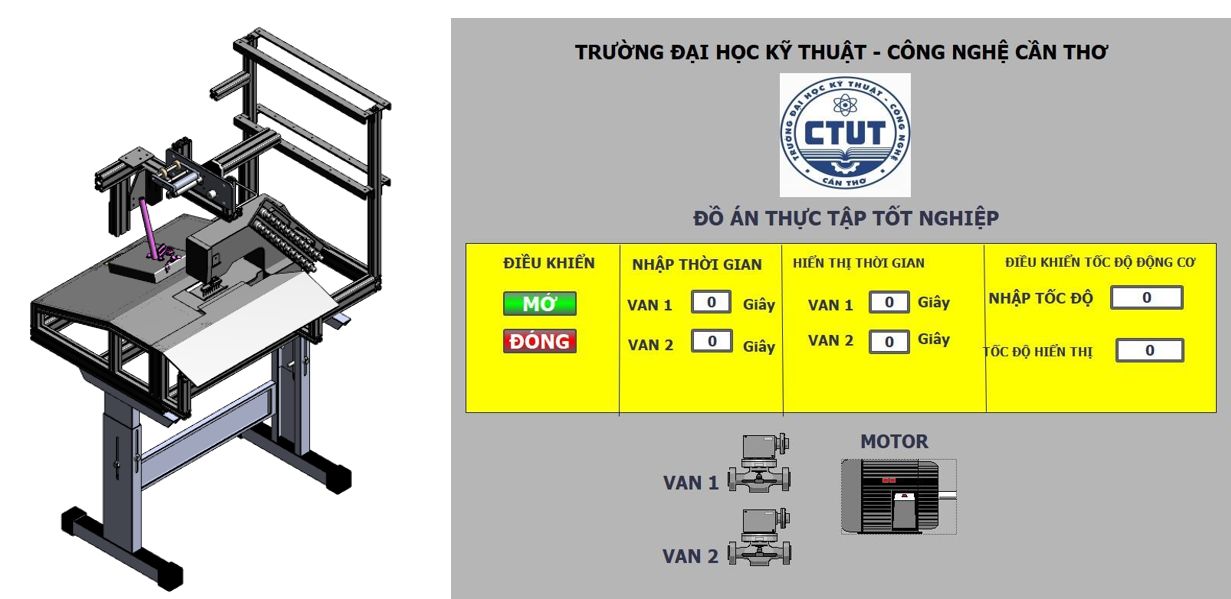
2.Tên đề tài: Tìm Hiểu Và Mô Phỏng Quy Trình May Mặc Tại Công Ty TNHH NV APPAREL
Tác giả thực hiện:
Nguyễn Huỳnh Giao 2000329
Nguyễn Quốc Kỳ 2000031
Ngành: Công nghệ kỹ thuật cơ điện tử
Tóm tắt: Hiện nay với sự phát triển mạnh mẽ của khoa học kỹ thuật cùng với sự phát triển của cuộc cách mạng công nghiệp 4.0. Tự động hóa trong sản xuất cũng dần trở nên phổ biến và gần gũi hơn với người lao động. Nhằm mục đích nâng cao sản lượng cũng như chất lượng sản phẩm đồng thời tiết kiệm thời gian và chi phí sản xuất. Đó là lí do mà nhóm tác giả đã chọn đề tài “Tìm hiểu và mô phỏng quy trình may mặc tại công ty TNHH NV APPAREL”. Với mục tiêu nghiên cứu của đề tài là “tìm hiểu và mô phỏng quy trình may mặc tại công ty TNHH NV APPAREL” sau quá trình thực hiện nhóm tác giả đã tìm hiểu được các thiết bị máy móc có trong sản xuất của công ty TNHH NV APPAREL. Cũng trong thời gian đó nhóm tác giả cũng biết lắp đặt sửa chữa và vận thành một số máy móc. Biết được công dụng và cách sử dụng các thiết bị có trong công nghiệp như: PLC, bộ điều khiển drive, động cơ bước, cảm biến encoder, xy lanh khí nén, từ đó xây dựng chương trình điều khiển và thử nghiệm. Kết nối PLC S7-1200, cảm biến encoder, bộ điều khiển driver, động cơ bước, xy lanh khí nén để cải tiến ra máy may viền ba sọc hỗ trợ cho công nhân may của công ty. Thiết kế được giao diện HMI để có thể điều khiển động cơ DC, điều chỉnh thời gian đóng mở van khí nén một cách hợp lý. Trong thời gian thực tập và nghiên cứu tại công ty nhóm tác giả đã nhận thấy rằng việc chuyển khai mô hình máy may viền ba sọc đã năng cao sản lượng cho chuyền hỗ trợ. Hệ thống máy may viền ba sọc có thể may cùng một lúc ba viền thay vì may một viền như lúc trước đây và đáp được khoảng cách các đường viền, giảm sai sót trong sản xuất, do máy may viền ba sọc mới đưa vào hoạt động hàng loạt nên không tránh khỏi việc mất các lỗi vặt như hay bị ướt hàng, hư hỏng động cơ bước,hay bị hư van chịu nhiệt. Từ số liệu thống kê sản lượng sản xuất trước và sau khi có máy may viền ba sọc ta có thể thấy, khi có máy may viền ba sọc thì sản lượng sản xuất của dây chuyền hỗ trợ tăng lên mức 143,45 % và gấp 2,43 lần so với sản lượng lúc chưa có máy may viền ba sọc trong một ca làm việc tám tiếng.
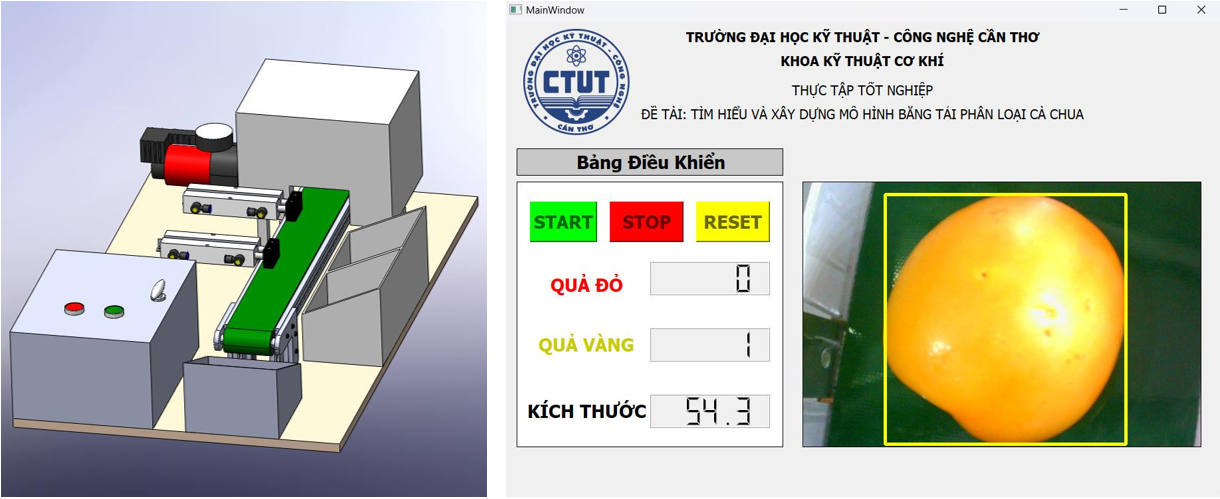
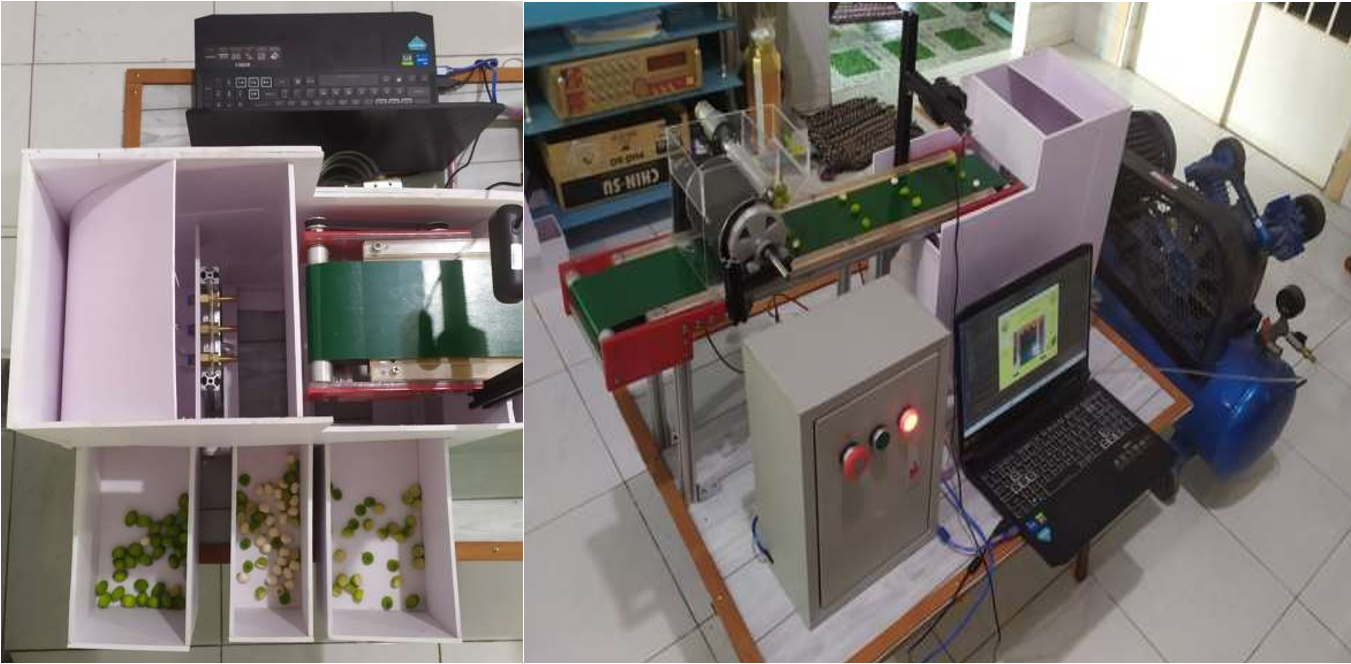
3.Tên đề tài: TÌM HIỂU VÀ XÂY DỰNG MÔ HÌNH BĂNG TẢI PHÂN LOẠI CÀ CHUA
Tác giả thực hiện:
Bùi Minh Khôi MSSV: 2000680
Nguyễn Khánh Duy MSSV: 2000720
Ngành: Công nghệ kỹ thuật Cơ điện tử
Tóm tắt: Ngày nay cùng với sự phát triển của các ngành khoa học kỹ thuật, kỹ thuật điện tử mà trong đó điều khiển tự động đóng vai trò hết sức quan trọng trong mọi lĩnh vực khoa học kỹ thuật, quản lý, công nghiệp tự động hóa… Do đó chúng ta cần phải nắm bắt và vận dụng điều khiển tự động một cách hiệu quả nhằm đóng góp vào sự phát triển khoa học kỹ thuật của thế giới nói chung và trong sự phát triển của kỹ thuật điều khiển tự động nói riêng. Xuất phát từ những lần tham quan các doanh nghiệp có dây chuyền sản xuất, chúng em đã được thấy nhiều khâu tự động hóa trong quá trình sản xuất. Một trong những khâu sản xuất tự động hóa đó là khâu phân loại nông sản thực phẩm sử dụng bộ điều khiển lập trình PLC Siemens. Sau khi tìm hiểu, nghiên cứu về các đề tài và công trình trước đây, nhóm em chọn đề tài: “TÌM HIỂU VÀ XÂY DỰNG MÔ HÌNH BĂNG TẢI PHÂN LOẠI CÀ CHUA”. Đã có khá nhiều đề tài thực hiện việc mô hình phân loại nông sản như phân loại theo chiều cao, phân loại theo khối lượng theo kích thước. Nhưng với những nông sản có khối lượng và kích thước nhỏ và màu sắc thay đổi theo tính chất của nông sản thì các mô hình phân loại kia không phù hợp. Vì vậy chúng ta cần một hướng xử lý phù hợp hơn cho hệ thống phân loại này đó là phân loại dựa trên màu sắc.Và nhiều hệ thống chỉ thực hiện phân loại mà chưa thực hiện giám sát, quản lý việc phân loại. Vì vậy chúng ta cần xây dựng việc giám sát quá trình phân loại cho hệ thống. Với đề tài này mục tiêu mà nhóm đề ra là tìm hiểu và nghiên cứu sâu hơn và PLC S7 – 1200 và các ứng dụng trong thực tế. Từ đó thiết kế và thi công mô hình phân loại cà chua theo màu sắc. Bên cạnh đó là điều khiển và giám sát hoạt động của mô hình.
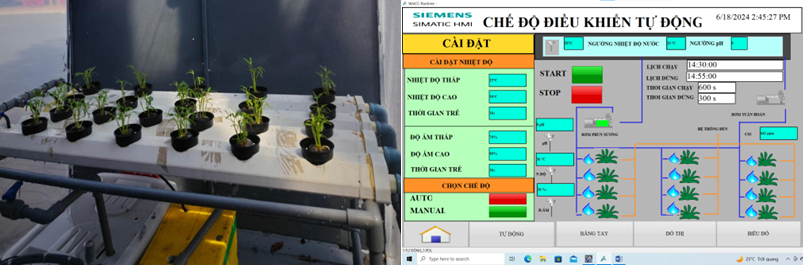
4.Tên đề tài: XÂY DỰNG MÔ HÌNH TRỒNG RAU THỦY CANH BÁN TỰ ĐỘNG SỬ DỤNG CÔNG NGHỆ LORA VÀ MODBUS TCP/IP
Tác giả thực hiện:
Nguyễn Thái Vinh (MSSV: 2000544)
Lâm Hoàng Luận (MSSV: 2001160)
Ngành: CNKT Cơ điện tử
Tóm tắt: Nhóm tác giả đã chọn đề tài “Xây dựng mô hình trồng rau thủy canh bán tự động sử dụng công nghệ LoRa và Modbus TCP/IP” với mục đích nghiên cứu và phát triển một phương pháp trồng rau hiện đại, tận dụng công nghệ thông tin và truyền thông để tối ưu hóa quy trình trồng rau thủy canh Hiện nay, nghiên cứu về việc ứng dụng công nghệ cao để giám sát từ xa các thông số môi trường trong nông nghiệp thường sử dụng các công nghệ truyền thông truyền thống như Zigbee, Wifi, GSM/GPRS, Bluetooth,… Các công nghệ này có phạm vi hoạt động từ 10 đến 100 m, nên chỉ phù hợp cho việc giám sát trong các khu vực nhỏ. Khi khu vực giám sát lớn hoặc có nhiều khu vực, việc xây dựng mạng cảm biến trở nên phức tạp, cồng kềnh và tốn kém chi phí. Hơn nữa, tiêu thụ năng lượng cao cũng làm giảm thời lượng pin của các cảm biến. Để mở rộng khả năng kết nối nhiều cảm biến trên phạm vi rộng, tiêu thụ ít năng lượng và giảm chi phí xây dựng mạng cảm biến, nhóm tác giả đã quyết định sử dụng công nghệ truyền thông Modbus TCP/IP và LoRa. Nhóm tác giả đã tìm cách điều khiển từ xa một số hoạt động như gia nhiệt, phun sương,… nhằm tối ưu hóa quy trình sản xuất. Việc theo dõi nhiệt độ và độ ẩm trong mô hình trồng rau thủy canh giúp người trồng chủ động hơn trong việc chăm sóc cây, đảm bảo hiệu quả sản xuất cao. Cách làm này tiết kiệm công sức và thời gian lao động, đồng thời tăng hiệu quả kinh tế nhờ chăm sóc rau theo lưu lượng phù hợp với chu trình sinh trưởng, tránh lãng phí không cần thiết. Về mặt kinh tế, hệ thống trồng rau thủy canh thông minh này đẩy mạnh đầu tư vào công nghệ, cơ sở vật chất và máy móc; tăng năng suất, sản lượng và chất lượng rau; tối ưu hóa chi phí và thời gian chăm sóc, và đặc biệt là giảm rủi ro nhiều lần so với phương pháp trồng rau truyền thống.
5.Tên đề tài: TÌM HIỂU QUY TRÌNH BẢO TRÌ VÀ BẢO DƯỠNG XE TẠI CÔNG TY CẦN THƠ FORD
Tác giả thực hiện: Nguyễn Dương Khang 2001119
Ngành: Công nghệ kỹ thuật Cơ điện tử
Tóm tắt: Bảo dưỡng xe ô tô là thực hiện những công việc cần thiết, bắt buộc đối với người chủ xe khi ô tô của họ đã đi đủ một quãng đường quy định hay sau khi xe đã chạy một thời gian dài. Mục đích khi bảo dưỡng xe là kiểm tra, phát hiện những hư hỏng tiềm tàng sắp xảy ra và ngăn ngừa xảy ra các hư hỏng để chiếc xe vận hành bình thường, an toàn; chăm sóc, bảo dưỡng hệ thống, cơ cấu, động cơ, bộ phận chiếc xe để chiếc xe làm việc hiệu quả, ổn định, an toàn cho người lái.
Mục đích thực tập tốt nghiệp:
– Giúp sinh viên củng cố kiến thức và vận dụng những lý thuyết đã được trang bị trong trường vào công việc thực tế.
– Giúp sinh viên cọ sát với những công việc thực tiễn dựa trên nền tảng kiến thức mà bản thân hiểu biết.
– Giúp sinh viên nắm bắt được những nội quy và quy trình làm việc của ngành nghề.
– Sinh viên được học hỏi một phần kiến thức và tích lũy một phần nào kinh nghiệm trong công việc.
Nhiệm vụ thực tập tốt nghiệp:
– Tìm hiểu về Công Ty Cổ Phần Đầu Tư TMDV Sài Gòn Ô Tô Cần Thơ, tìm hiểu quy trình bảo trì và bảo dưỡng xe tại Công Ty Cần Thơ Ford.
– Thu thập tài liệu theo phương pháp (Thống kê, quan sát và phân tích) qua những báo cáo thông tin tại Công Ty Cổ Phần Đầu Tư TMDV Sài Gòn Ô Tô Cần Thơ, các thông tin trên trang web và các tài liệu chi tiết tại trụ sở.
– Sinh viên thực tập đúng thời gian quy định của nhà trường.
– Tuân thủ nội quy của Công ty, làm mọi công việc đều phải thông qua sự đồng ý của người chịu trách nhiệm ở xưởng.
– Có thái độ làm việc nghiêm túc, tôn trọng mọi người, khi vắng mặt phải xin
phép người chịu trách nhiệm ở xưởng.

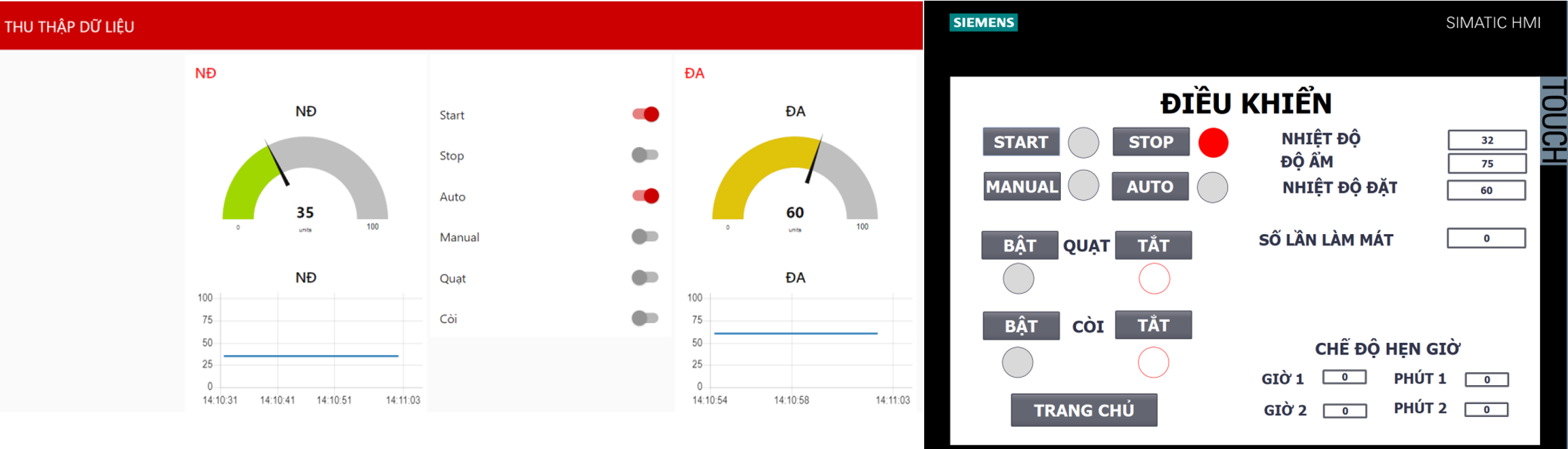
6.Tên đề tài: TÌM HIỂU VÀ XÂY DỰNG HỆ THỐNG SCADA GIÁM SÁT TRẠM BIẾN ÁP
Tác giả thực hiện: Huỳnh Thế Vinh 2001228
Ngành: Công nghệ kỹ thuật Cơ điện tử
Tóm tắt: Đề tài “Tìm hiểu và xây dựng Hệ thống SCADA giám sát trạm Biến áp” là một đề tài đặt ra những vấn đề thực tiễn. Vấn đề khoa học cần được đặt ra là làm thế nào để thu thập dữ liệu từ thiết bị đóng cắt, các thiết bị đo lường như biến dòng điện, biến điện áp và các thao tác điều khiển đóng cắt các thiết bị. Đảm bảo độ ổn định, tối ưu hiệu suất hoạt động, cải thiện chất lượng, mang lại lợi nhuận và tiết kiệm tối đa chi phí cũng như nguồn lao động. Mục tiêu nghiên cứu nhằm: Tìm hiểu về Trạm biến áp và các thông số cần giám sát (ví dụ: nhiệt độ, độ ẩm, điện áp, cường độ dòng điện, tần số…), thu thập dữ liệu và truyền dữ liệu thông qua mạng Lora kết nối PLC, tạo giao diện HMI. Một số phương pháp nghiên cứu chính: thử nghiệm thực tế trên máy, phân tích số liệu và dữ liệu, sử dụng công nghệ cảm biến, nghiên cứu về công nghệ mới.
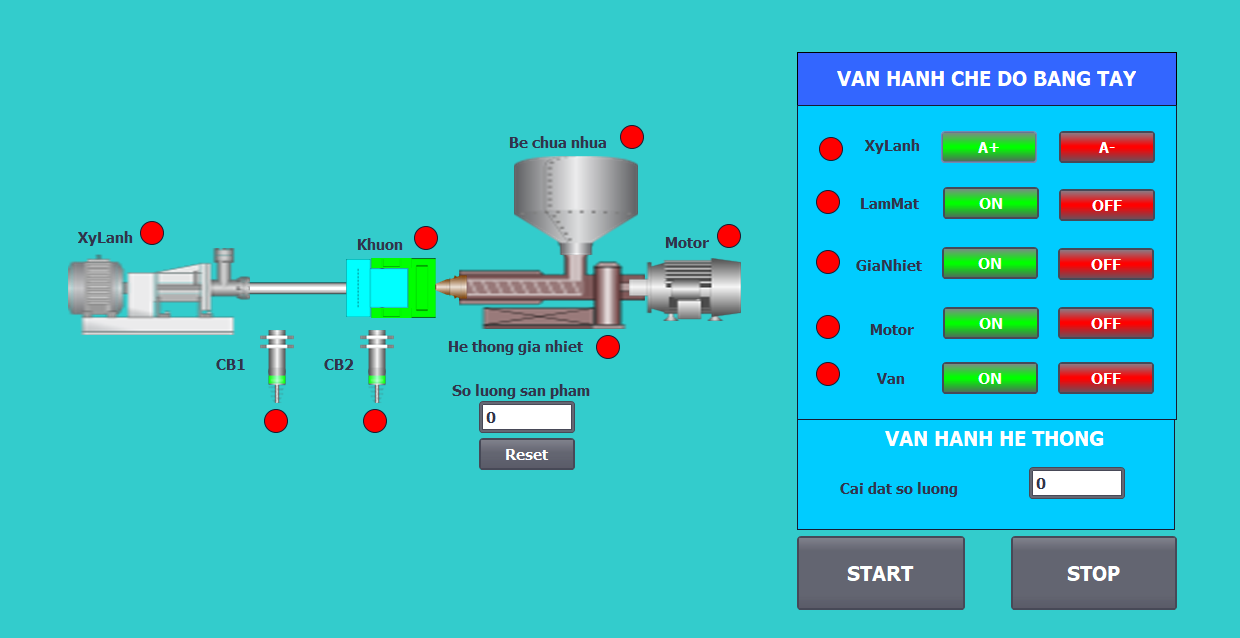
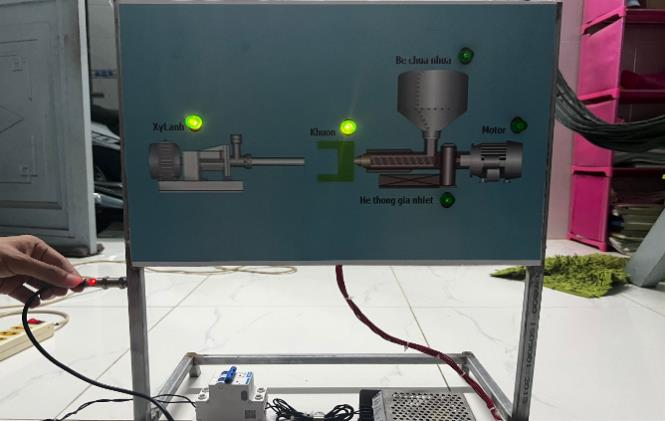
7.Tên đề tài: TÌM HIỂU QUY TRÌNH SẢN XUẤT NHỰA CÔNG NGHIỆP VÀ MÔ PHỎNG
SỬ DỤNG PLC S7-1200
Tác giả thực hiện: Lê Tường Khang 2000623
Ngành: Công nghệ kỹ thuật Cơ điện tử
Tóm tắt:
Xuất phát từ những nhu cầu sử dụng thực tế của người tiêu dùng cùng với sự phát triển vượt bậc của khoa học công nghệ ngày nay, tác giả nghiên cứu tạo ra mô hình sản xuất nhựa công nghiệp nhằm phục vụ cho những nghiên cứu trong tương lai. Đề tài “TÌM HIỂU QUY TRÌNH SẢN XUẤT NHỰA CÔNG NGHIỆP VÀ MÔ PHỎNG SỬ DỤNG PLC S7-1200” được nghiên cứu với mục đích tạo ra mô hình thực tế có những tính năng tiên tiến giúp cho qui trình sản xuất nhựa được tốt hơn, hoàn thiện hơn và tạo ra được nhiều sản phẩm chất lượng cao đảm bảo tiết kiệm được chi phí và thời gian sản xuất.
Tác giả nghiên cứu đề tài trên với mục tiêu:
– Tìm hiểu và xây dựng mô hình tổng quát quá trình sản xuất nhựa công nghiệp
– Xây dựng chương trình điều khiển và thử nghiệm PLC S7-1200
– Thiết kế giao diện HMI
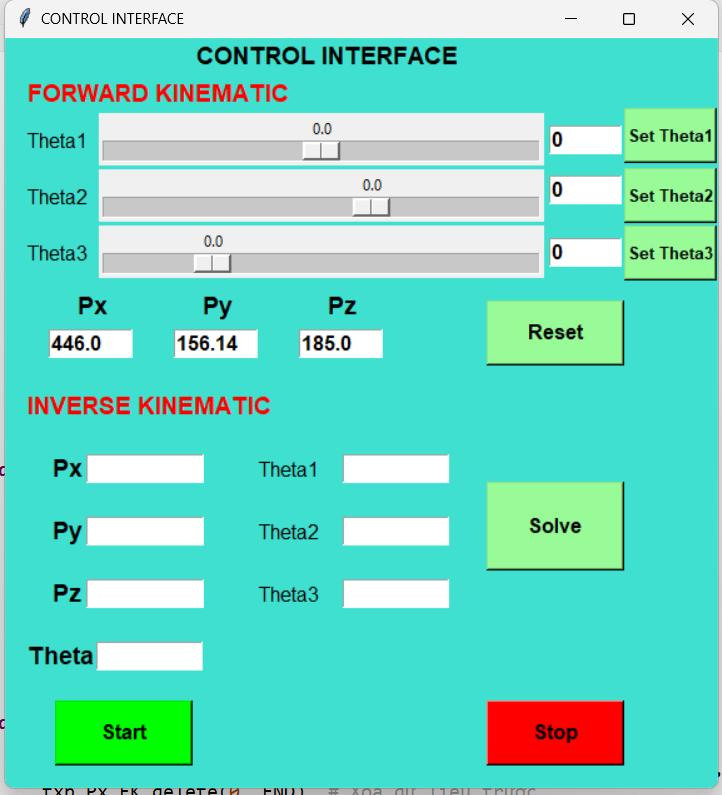
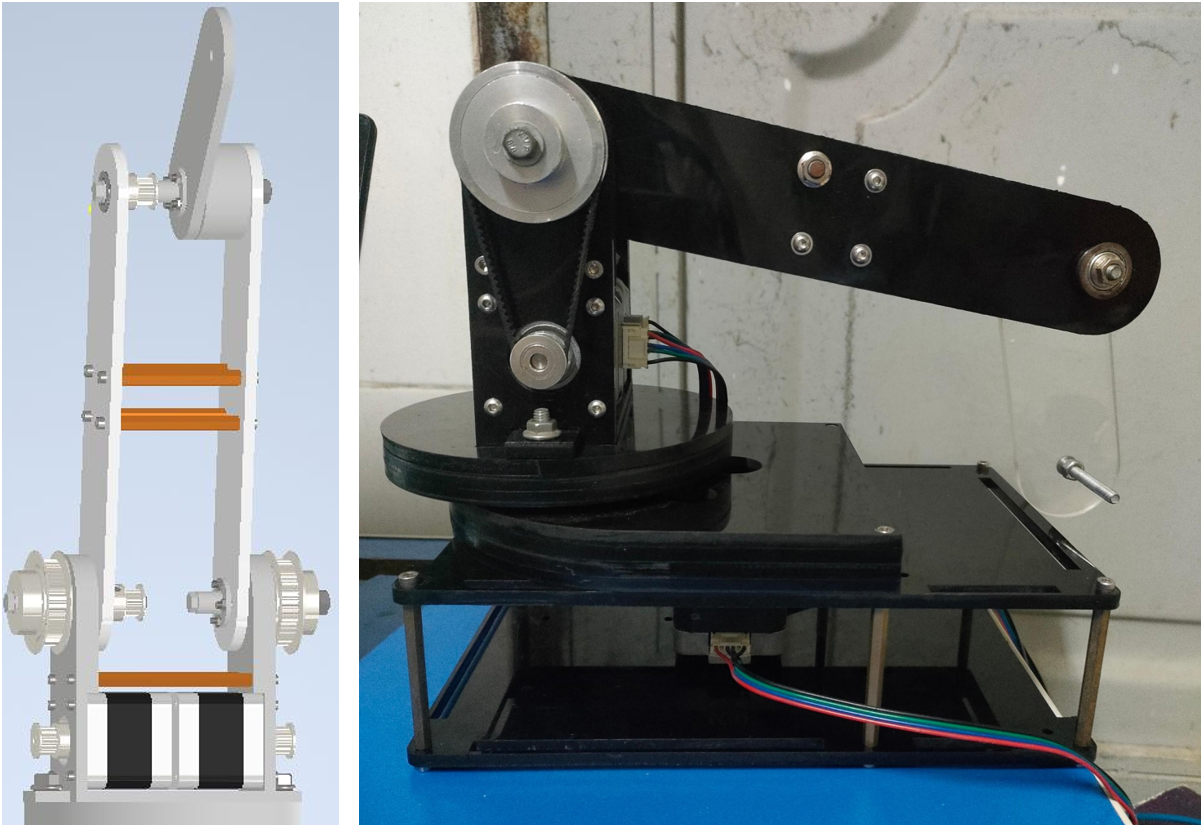
8.Tên đề tài: TÌM HIỂU ĐỘNG HỌC VÀ XÂY DỰNG MÔ HÌNH CÁNH TAY ROBOT 3 BẬC TỰ DO
Tác giả thực hiện: Nguyễn Hiền Nhân 2000237
Ngành: Công nghệ kỹ thuật Cơ điện tử
Tóm tắt: Chủ đề “Tìm hiểu động học và xây dựng mô hình cánh tay robot 3 bậc tự do” là một lĩnh vực nghiên cứu quan trọng trong ngành robot học. Trong chủ đề này, chúng ta sẽ tìm hiểu về cách cánh tay robot 3 bậc tự do hoạt động và làm thế nào để xây dựng mô hình để mô phỏng và điều khiển chúng. Động học của cánh tay robot 3 bậc tự do đề cập đến việc nghiên cứu vận động của cánh tay robot trong không gian ba chiều. Điều này bao gồm việc xác định vị trí, vận tốc, gia tốc và lực tác động lên các khớp của cánh tay robot. Việc hiểu rõ động học của cánh tay robot là quan trọng để thiết kế các chương trình điều khiển hiệu quả. Việc xây dựng mô hình cánh tay robot 3 bậc tự do giúp chúng ta hiểu rõ hơn về cấu trúc và vận động của robot trong không gian. Mô hình này thường bao gồm các thông số như chiều dài của các khớp, góc quay của mỗi khớp, và các ràng buộc vận động giữa các khớp. Bằng cách xây dựng mô hình này, chúng ta có thể mô phỏng và điều khiển cánh tay robot một cách chính xác và linh hoạt. Tìm hiểu động học và xây dựng mô hình cánh tay robot 3 bậc tự do là một chủ đề thú vị và hứa hẹn đem lại nhiều kiến thức và kỹ năng mới trong lĩnh vực robot học và tự động hóa.
Mục tiêu:
– Thiết kế cánh tay robot 3 bậc tự do.Thực tập tốt nghiệp
– Tính toán động học robot và điều khiển được cánh tay robot.
– Thi công chế tạo cánh tay robot và xây dựng giao diện điều khiển.
9.Tên đề tài: TÌM HIỂU QUY TRÌNH CẤP NƯỚC VÀ XỬ LÝ NƯỚC SẠCH TẠI HỆ THỐNG CẤP NƯỚC XÃ NHƠN ÁI, HUYỆN PHONG ĐIỀN
Tác giả thực hiện: Phạm Khánh Duy 2000823
Ngành: Công nghệ kỹ thuật Cơ điện tử
Tóm tắt: Hệ thống cấp nước sạch là nơi xử lý nước sông, hồ… qua quá trình xử lý nước thô sẽ trở thành nước sạch sử dụng được, nhằm cung cấp cho người dân sử dụng phục vụ đời sống. Hệ thống cấp nước được vận hành tự động hóa quá trình cung cấp, kiểm soát và giám sát sản xuất và phân phối nước. Nó bao gồm các thiết bị cảm biến và bộ điều khiển được sử dụng để thu thập dữ liệu về chất lượng và mức độ nước, áp suất, lưu lượng và các thông số khác liên quan đến quá trình sản xuất và phân phối nước. Dữ liệu đã được thu thập thông qua quan sát trực tiếp và đọc các chỉ số trên thiết bị điều khiển. Từ đó, hệ thống cấp nước đã được phân tích và mô tả chi tiết về cấu trúc và chức năng của nó. Đồng thời, dữ liệu đã được thu thập và phân tích từ hệ thống nhằm hướng dẫn trực tiếp vận hành và bảo trì thiết bị của nhà máy. Nghiên cứu nắm bắt được kiến thức về điều khiển và ứng dụng trong ngành nước, đồng thời làm nền tảng cho việc nghiên cứu và đề xuất các cải tiến trong tương lai. Kết quả của nghiên cứu này là việc nắm bắt được kiến thức sâu sắc về hệ thống cấp nước của nhà máy nước và ứng dụng của nó trong ngành nước, hiểu rõ hơn về vai trò quan trọng của nước trong quá trình sản xuất và đời sống. Nghiên cứu này cũng làm nền tảng cho việc đề xuất và nghiên cứu các cải tiến trong tương lai, nhằm cải thiện hiệu suất, tiết kiệm năng lượng và nâng cao chất lượng nước trong quá trình cung cấp nước cho cộng đồng.

B – ĐỒ ÁN TỐT NGHIỆP
10.Tên đề tài: NGHIÊN CỨU THIẾT KẾ, MÔ PHỎNG VÀ PHÂN TÍCH SẢN PHẨM KHUÔN ÉP NHỰA
Tác giả thực hiện: Lý Anh Hải, MSSV: 2000381
Ngành: Công nghệ kỹ thuật Cơ điện tử
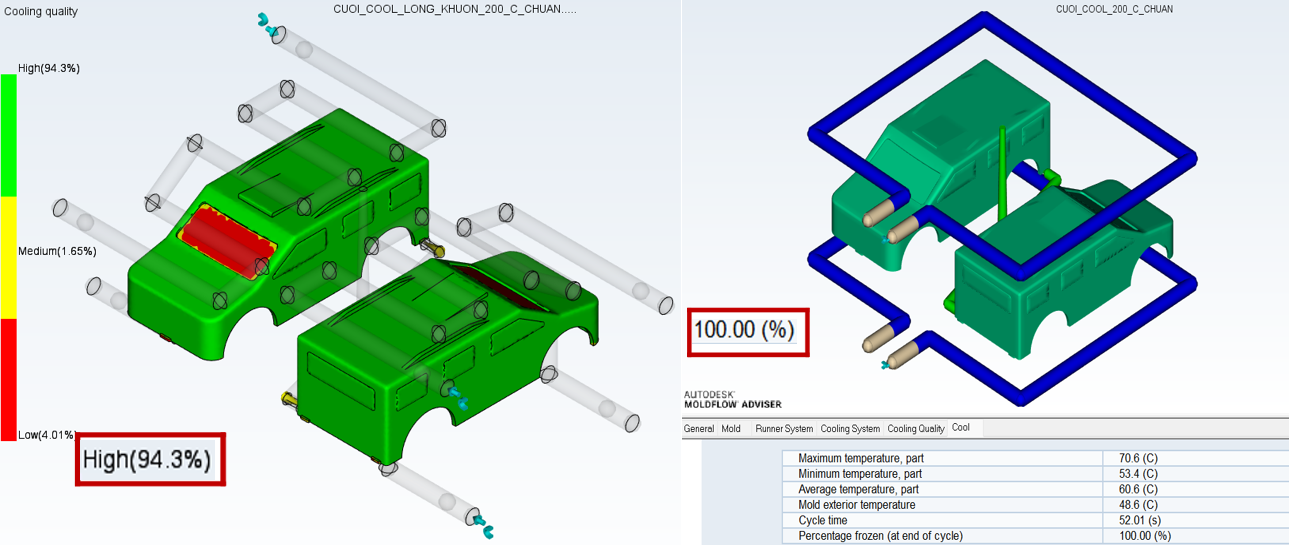
Tóm tắt: Nghiên cứu này tập trung vào việc thiết kế, mô phỏng và phân tích khuôn ép nhựa cho sản phẩm xe đồ chơi trẻ em, nhằm phục vụ trong trong đời sống. Tôi sử dụng phần mềm Autodesk Inventor để tạo mô hình chi tiết 3D của sản phẩm và hệ thống khuôn hai tấm. Phần mềm Autodesk Moldflow được sử dụng để phân tích quá trình điền đầy khuôn, bao gồm các yếu tố như nhiệt độ khuôn, nhiệt độ nhựa, thời gian điền đầy sản phẩm, thời gian làm nguội và thời gian hoàn thành chu kỳ.
Kết quả thiết kế đã đáp ứng các thông số kỹ thuật cần thiết, tuy nhiên, quá trình mô phỏng cho thấy một số khu vực có hiện tượng nóng chảy không đồng đều và các vùng dễ gặp lỗi như vết hàn và bọt khí. Thời gian chu kỳ còn dài, kéo dài thời gian sản xuất.
Để tối ưu hóa quá trình sản xuất, tôi kiến nghị nên tiếp tục nghiên cứu và phát triển thiết kế, nhằm rút ngắn thời gian chu kỳ và nâng cao chất lượng sản phẩm. Đồng thời, tôi cũng sẽ nghiên cứu thêm về khuôn ba tấm để so sánh và đánh giá sự tối ưu giữa khuôn hai tấm và khuôn ba tấm, hướng tới việc ứng dụng trong sản xuất đồ chơi trẻ em một cách hiệu quả nhất.
11.Tên đề tài: NGHIÊN CỨU THIẾT KẾ, MÔ PHỎNG VÀ PHÂN TÍCH SẢN PHẨM KHUÔN ÉP NHỰA
Tác giả thực hiện:
Trần Văn Líl 2001015
Ngô Huỳnh Nhật Khánh 2001156
Ngành: Công nghệ kỹ thuật Cơ điện tử
Tóm tắt: Ngày nay, việc áp dụng khoa học – công nghệ kỹ thuật vào nền nông nghiệp đang rất phổ biến và phát triển ở Việt Nam. Vì thế, đề tài “ Thiết kế, chế tạo máy gieo hạt cải ngọt” nhằm mục đích nâng cao năng suất làm việc, tiết kiệm nguồn nhân lực lao động thủ công, giảm chi phí thuê lao động tay chân và nâng cao độ chính xác của hạt giống, khoảng cách của các cây cải ngọt. Đề tài máy gieo hạt cải ngọt này dựa trên rất nhiều loại máy gieo hạt trước đó đã có trên thị trường, nhận thấy vẫn còn chưa tối ưu và giá thành còn khá cao. Ở các nước phát triển thì việc đưa máy móc vào sản xuất để thay con người đã rất phát triển. Dựa vào những điều đó nên chúng tôi đã đề ra ý tưởng này để chế tạo ra một chiếc máy gieo hạt nhầm nâng cao năng suất, giá thành rẻ hơn những máy đã có trước đó và giảm chi phí phải thuê nhân công. Để thực hiện đề tài này chúng tôi đã tìm hiểu các loại máy đã có trước đó, cũng như các loại máy đã có ở nước có nền nông nghiệp tiên tiến. Chúng tôi đã phải xác định xem những loại máy đã được đưa vào sản xuất đó có những gì chưa tối ưu hoặc có thể giảm chi phí xuống để dễ tiếp cận đến hơn với mọi người. Tính toán sử dụng loại động cơ, nguồn điện như thế nào để phù hợp ở loại hình và điều kiện nhiệt độ ở Việt Nam. Sau khi hoàn thành mô hình và đưa ra chạy thực nghiệm. Kết quả nhận được là máy có thể chạy và thực hiện gieo hạt một cách độc lập trên luống mà không cần sự can thiệp của con người, khoảng cách giữa các cây đồng đều, có thể điều chỉnh tốc độ và khoảng cách gieo hạt của máy.
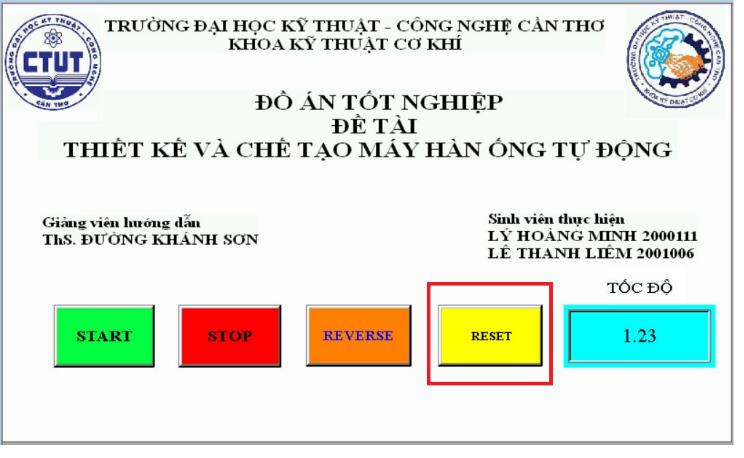
12.Tên đề tài: NGHIÊN CỨU THIẾT KẾ, MÔ PHỎNG VÀ PHÂN TÍCH SẢN PHẨM KHUÔN ÉP NHỰA
Tác giả thực hiện:
Lý Hoàng Minh 2000111
Lê Thanh Liêm 2001006
Ngành: Công nghệ kỹ thuật Cơ điện tử
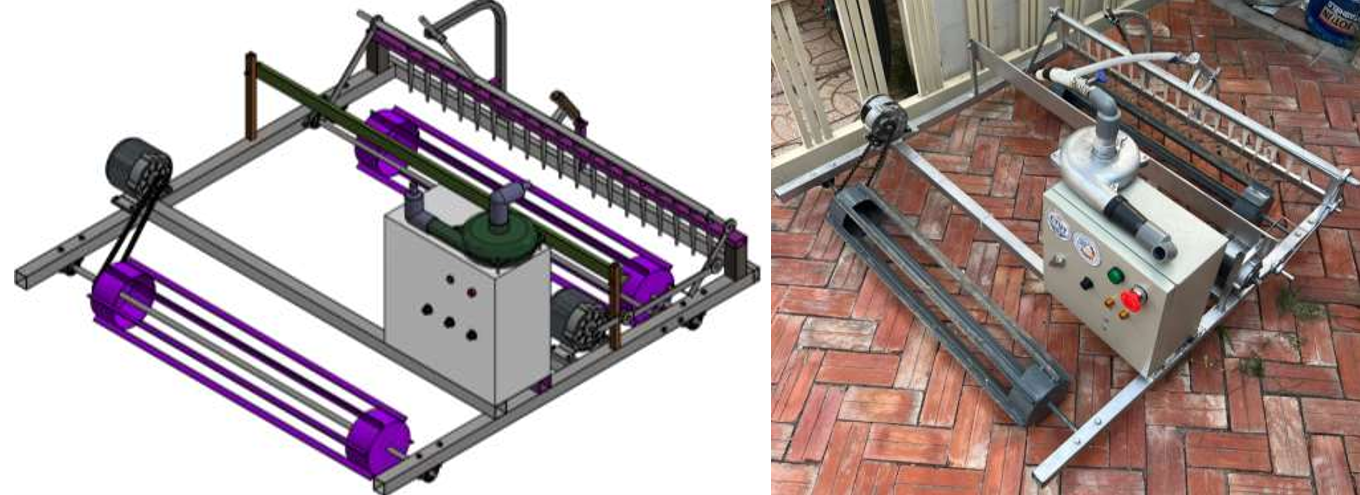
Tóm tắt: Máy được thiết kế để làm việc với các ống có đường kính và độ dày khác nhau theo yêu cầu cụ thể của công ty, chúng tôi nghiên cứu thiết kế chế tạo máy hàn ống tự động sử dụng trong nhà máy, các cơ sở sản xuất đồ gia dụng để tự động hàn các đường ống có kích cỡ khác nhau trong quy trình sản xuất. Máy hàn ống tự động có khả năng hàn các loại vật liệu khác nhau như inox, thép carbon và thép không gỉ. Máy được trang bị cảm biến từ để xác định số vòng quay của ống đảm bảo khi ống xoay đủ một vòng thì tự động ngắt máy hàn và sử dụng hệ thống điều khiển bằng PLC đảm bảo quá trình hàn diễn ra chính xác và đồng đều. Một số tính năng chính của máy hàn ống tự động bao gồm khả năng điều chỉnh tốc độ hàn, chuyển đổi giữa chế độ tự động hoặc bằng tay, đảo chiều quay động cơ. Vì máy được thiết kế tự động nên tối ưu hóa được hiệu suất và giảm thiểu được sai sót do con người. Việc sử dụng máy hàn ống tự động giúp tăng cường hiệu suất sản xuất, giảm thiểu sự phụ thuộc vào lao động và đảm bảo chất lượng sản phẩm.
– Nhóm đã nghiên cứu, tìm hiểu về công nghệ hàn Mig trong nước, các ưu điểm nhược điểm và nhu cầu sử dụng ống từ đó nêu lên được tính cấp thiết của đề tài.
– Trình bày các cơ sở lý thuyết, chọn vật liệu sử dụng và tính toán để đưa ra lắp ráp và chế tạo.
– Tiến hành thử nghiệm hàn trên phôi và đưa ra thông số hàn theo từng loại ống phổ biến trên thị trường.
– Đánh giá về máy và đưa ra các hướng phát triển sau này.

13.Tên đề tài: NGHIÊN CỨU THIẾT KẾ, MÔ PHỎNG VÀ PHÂN TÍCH SẢN PHẨM KHUÔN ÉP NHỰA
Tác giả thực hiện: Lê Đức Tín 2000767
Ngành: Công nghệ kỹ thuật Cơ điện tử
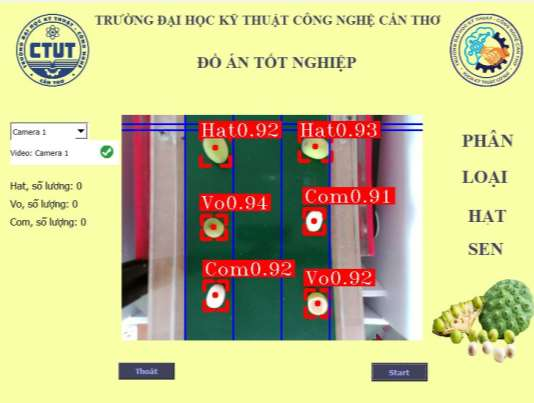
Tóm tắt: Trong đồ án này, tập trung vào việc phát triển một hệ thống phân loại hạt sen tự động, kết hợp giữa công nghệ nhận diện đối tượng YOLOv8 và cơ cấu cơ khí cùng với khí thổi để phân loại hạt sen. Phần đầu tiên đề cập đến việc nghiên cứu và phân tích về các thiết kế phân loại hạt hiện nay, đồng thời khảo sát về mô hình YOLOv8 để hiểu rõ về phương pháp được áp dụng. Phân tích ưu và nhược điểm của các phương pháp này và đề xuất một mô hình mới phù hợp với yêu cầu cụ thể của đồ án. Tiếp theo, tiến hành thiết kế và mô phỏng phần cơ khí của hệ thống phân loại hạt sen. Sử dụng phần mềm mô phỏng thử nghiệm để giảm tối thiếu sai sót khi triển khai thực tế. Sau đó, tập trung vào việc triển khai và tích hợp công nghệ YOLOv8 vào hệ thống tự động. Sử dụng YOLOv8 để nhận diện và xác định vị trí các hạt sen từ hình ảnh đầu vào và sử dụng thông tin này để tiến hành điều khiển hoạt động của béc thổi để phân loại chúng. Cuối cùng, triển khai và thử nghiệm hệ thống phân loại này trong điều kiện thực tế. Đánh giá độ tin cậy của hệ thống thông qua các bài kiểm tra và điều chỉnh mô hình để đạt được hiệu quả tốt nhất trong các ứng dụng thực tế. Tóm lại, đồ án này đề xuất và triển khai một hệ thống phân loại hạt sen tự động, kết hợp cả công nghệ nhận diện đối tượng YOLOv8 và cơ cấu cơ khí cùng với khí thổi, nhằm tối ưu hiệu suất và độ tin cậy trong quá trình phân loại sản phẩm.
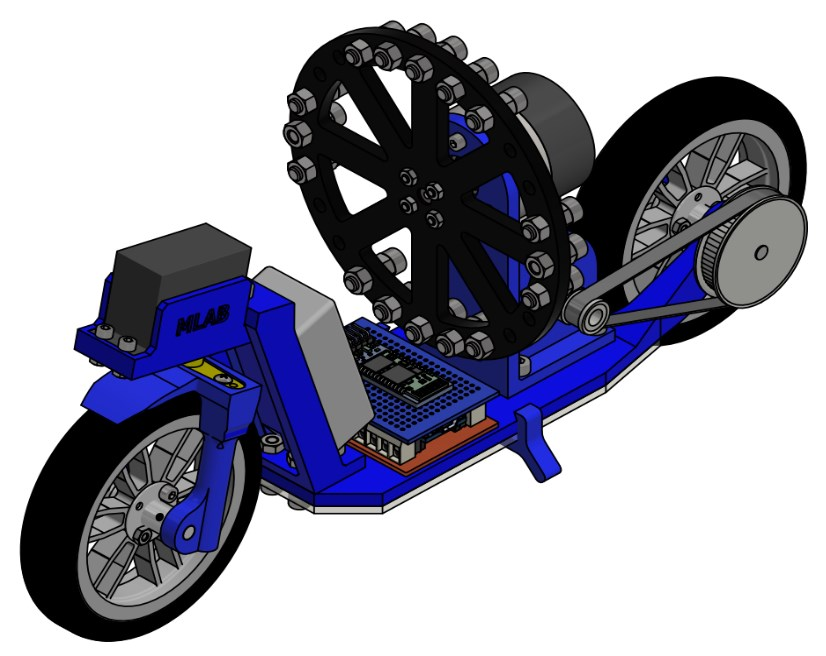
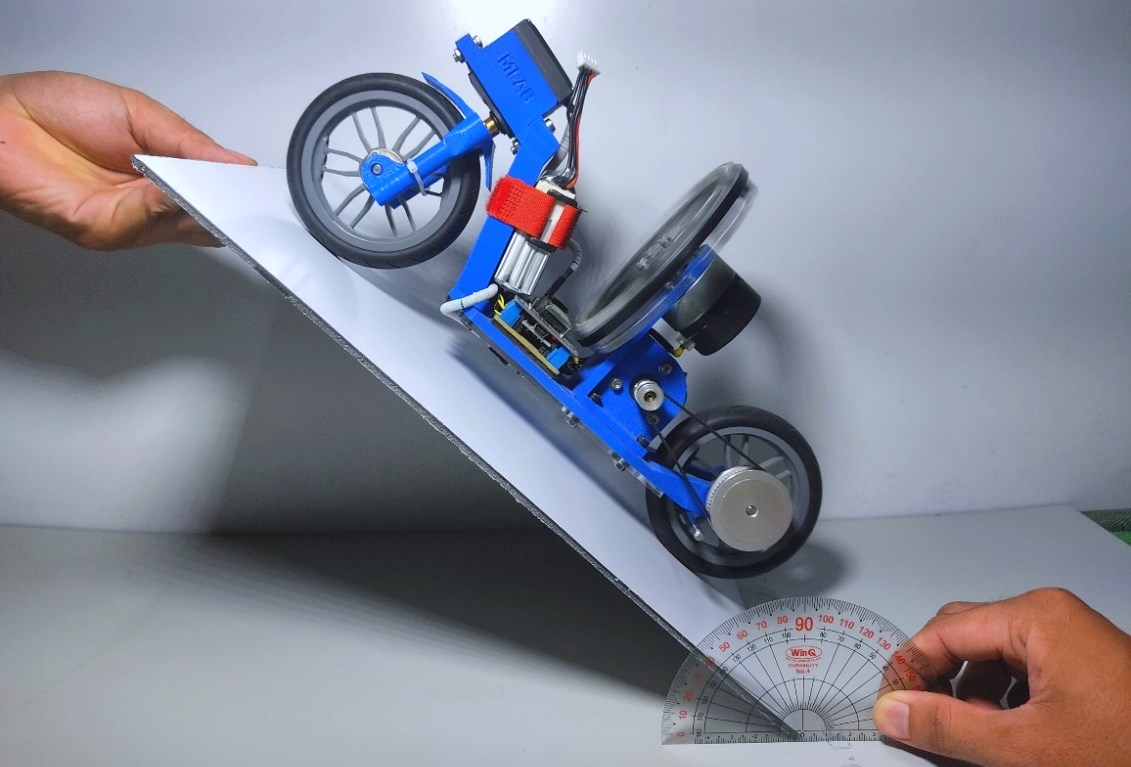
14.Tên đề tài: NGHIÊN CỨU THIẾT KẾ, MÔ PHỎNG VÀ PHÂN TÍCH SẢN PHẨM KHUÔN ÉP NHỰA
Tác giả thực hiện:
Nguyễn Quốc Anh 2000024
Lê Vĩ Khang 2000627
Ngành: Công nghệ kỹ thuật Cơ điện tử
Tóm tắt: Đề tài này chúng tôi tập trung nghiên cứu vấn đề thiết kế và chế tạo xe máy tự cân bằng, mục tiêu của đề tài này nhằm thiết kế chế tạo thành công xe máy tự cân bằng phục vụ cho việc nghiên cứu, học tập và giảng dạy. Tính toán lý thuyết để thiết kế các thông số cơ bản của xe để đảm bảo yêu cầu hoạt động đặt ra. Chế tạo kết cấu cơ khí đảm bảo xe hoạt động đủ tính năng về cân bằng, tốc độ di chuyển, hướng di chuyển,… Nghiên cứu giải thuật PID và lập trình tự cân bằng cho xe. Để thiết kế và chế tạo thành công xe máy tự cân bằng chúng tôi sử dụng phương pháp nghiên cứu lý thuyết về con quay hồi chuyển, sau khi tìm hiểu về lý thuyết chúng tôi sử dụng phương pháp mô hình hóa động lực học của xe máy tự cân bằng, sau đó chúng tôi thiết kế, chế tạo mô hình và lập trình cân bằng cho xe sử dụng bộ điều khiển PID. Kết quả thực nghiệm cho thấy bước đầu thành công trong việc chế tạo thành công mô hình xe máy tự cân bằng. Kết quả bộ điều khiển cho xe máy tự cân bằng ổn định góc nghiêng xe từ ±10o. Kết quả điều khiển xe bằng App MIT Inventor ổn định xe có thể bẻ lái trong khoảng ±30o và leo dốc tối đa 40o.
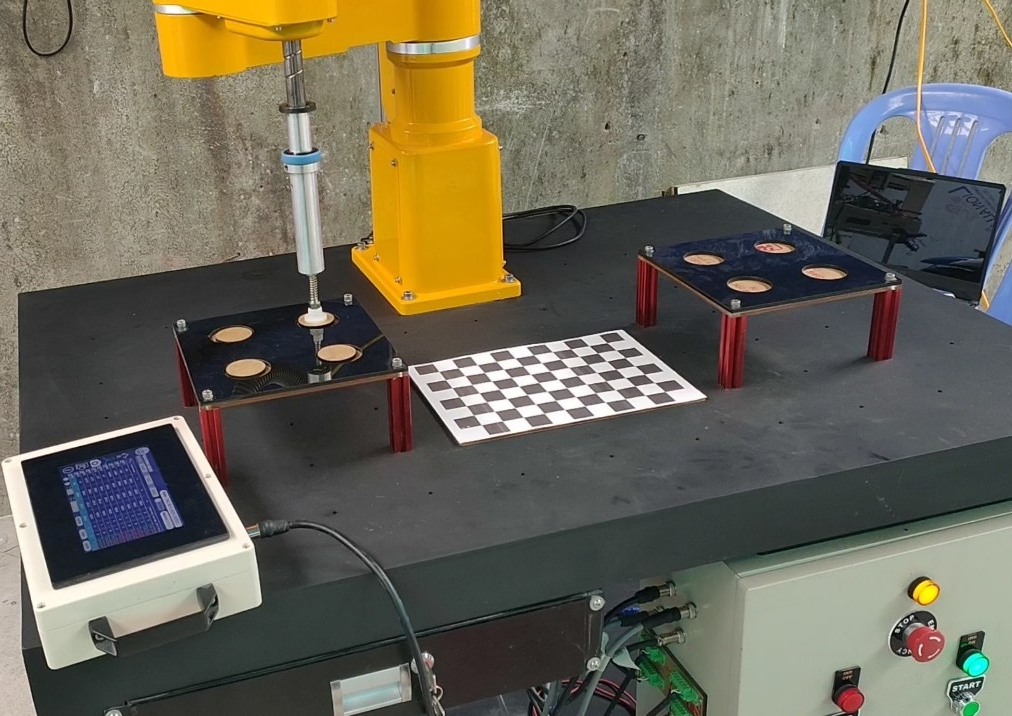
15.Tên đề tài: XÂY DỰNG VÀ ĐIỀU KHIỂN ROBOT SCARA
Tác giả thực hiện:
Nguyễn Quốc Anh 2000024
Lê Vĩ Khang 2000627
Ngành: Công nghệ kỹ thuật Cơ điện tử
Tóm tắt: Đồ án tốt nghiệp này nhằm mục đích xây dựng và điều khiển robot SCARA bốn bậc tự do tương tự như các robot đã thương mại và có thể áp dụng trong công nghiệp, phục vụ thực hành, thí nghiệm với chi phí thấp. Robot SCARA được xây dựng dựa trên phần cơ khí robot SCARA cũ có sẵn, hệ thống điều khiển được thực hiện trên vi điều khiển ESP32 và chuẩn giao tiếp tương tác người-máy được xây dựng trên màn hình Nextion. Robot có thể học lệnh và di chuyển từ điểm đến điểm dựa trên bài toán động học và đồng thời robot cũng có thể điều khiển thông qua xử lý ảnh. Kết quả đồ án đã hoàn thiện được phần cơ khí cho robot, giao diện HMI giúp người dùng dễ dàng thao tác điều khiển, chương trình học lệnh được hoàn thành và thử nghiệm thành công trong vấn đề gắp và đặt, điều khiển được robot di chuyển đến đúng vị trí vật thông qua xử lý ảnh.

16.Tên đề tài: THIẾT KẾ VÀ CHẾ TẠO MÁY ĐÓNG DẤU TỰ ĐỘNG
Tác giả thực hiện:
Bùi Tấn Đạt 2000122
Ngành: Công nghệ kỹ thuật Cơ điện tử
Tóm tắt: Đề tài “Thiết kế và chế tạo máy đóng dấu tự động” nhằm đáp ứng nhu cầu tối ưu hoá quy trình sản xuất và xét duyệt tài liệu trong nhiều lĩnh vực. Máy đóng dấu tự động giúp tiết kiệm thời gian và công sức, nâng cao độ chính xác và đồng nhất của sản phẩm. Mục tiêu nghiên cứu: – Tự động hoá quy trình đóng dấu. – Đảm bảo dấu in rõ và đồng nhất. Phương pháp nghiên cứu: – Phân tích và tổng hợp tài liệu về các máy đóng dấu có trên thị trường cũng như cơ cấu di chuyển của máy. – Thiết kế hệ thống phần cứng và giao diện giao tiếp với máy. – Tiến hành thử nghiệm và đánh giá hiệu quả của hệ thống. Máy đóng dấu tự động đã được chế tạo và lắp ráp hoàn chỉnh. Qua quá trình thử nghiệm, máy hoạt động tốt, đáp ứng các yêu cầu kỹ thuật và mục tiêu đề ra. Máy đóng dấu tự động đã chứng minh được tính khả thi và hiệu quả trong việc tối ưu hóa quy trình sản xuất. Công nghệ tự động hóa giúp nâng cao năng suất và giảm thiểu sự can thiệp của con người. Nghiên cứu tiếp theo có thể tập trung vào việc phát triển thêm các tính năng thông minh và cải tiến để nâng cao hiệu quả và mở rộng ứng dụng của máy trong nhiều lĩnh vực khác nhau. Điều này bao gồm tích hợp trí tuệ nhân tạo để cải thiện khả năng tự học và thích nghi của máy trong các nhu cầu sử dụng đa dạng.
Trân trọng ./.
